Para obtener información cuantitativa sobre la subestructura de las aleaciones nanocristalinas, el método de dispersión de rayos X de ángulo pequeño (SAX) tiene grandes posibilidades. Este método permite determinar el tamaño y la forma de partículas submicroscópicas con tamaños que oscilan entre 10 y 1000 Å. Las ventajas del método SAX incluyen el hecho de que en la región de los ángulos pequeños es posible ignorar la dispersión de Compton, así como la dispersión debida a las vibraciones térmicas y los desplazamientos estáticos, que son despreciables precisamente en la región de los ángulos pequeños. Cabe señalar que solo los electrones participan en la creación del patrón de difracción (la dispersión por núcleos es insignificante), por lo tanto, el patrón de difracción se puede utilizar para juzgar la distribución espacial de la densidad de electrones y el exceso y la deficiencia de electrones en La relación con la densidad de electrones promedio sobre la muestra actúa de manera equivalente.
Según la teoría clásica, la amplitud dispersada por una partícula esférica individual es igual a
donde es el ángulo de difracción, el módulo del vector de difracción es; - la función de distribución de la densidad electrónica en la partícula; Es el radio de la partícula.
La intensidad dispersada por una partícula esférica uniforme de radio que tiene una densidad de electrones se puede calcular más fácilmente.
Es una función de la forma de la partícula y su cuadrado es el factor de dispersión de una partícula esférica; - el número de electrones en la partícula, - la intensidad dispersada por el electrón (debe tenerse en cuenta que en la región del sitio cero de la red recíproca, la dependencia angular de la función puede despreciarse, es decir).
Como se muestra en, Guinier propuso un método simplificado para calcular la intensidad, que consiste en el hecho de que para un tamaño de partícula pequeño y para, tenemos. Por lo tanto, al expandir en una serie, puede limitarse a los dos primeros términos:
La cantidad se llama radio de giro del electrón (radio de giro) de la partícula y es la raíz cuadrada media del tamaño de la partícula (falta de homogeneidad). Es fácil mostrar que para una partícula esférica homogénea de radio que tiene densidad de electrones, el radio de giro se expresa en términos de su radio de la siguiente manera: es el volumen de la inhomogeneidad, y son las densidades de electrones de la sustancia de la inhomogeneidad y matriz, respectivamente). Basado en lo anterior, obtenemos:
En el caso de un sistema enrarecido monodisperso, cuando se puede despreciar la interferencia de haces dispersos por varias partículas, el perfil de intensidad de la dispersión del sitio cero de la red recíproca por un sistema que contiene partículas en el volumen irradiado se puede describir mediante la siguiente fórmula:
Esta fórmula (2.7) fue obtenida por Guinier y lleva su nombre.
El valor se encuentra mediante la fórmula:
donde es la intensidad del haz primario; y son la carga y la masa del electrón, respectivamente; - la velocidad de la luz en el vacío; Es la distancia de la muestra al punto de observación.
Como se muestra en la fig. 4, las dependencias de la intensidad del ángulo, calculadas por las fórmulas (2.2) y (2.7) para una partícula esféricamente homogénea de radio, coinciden bien en.
| Arroz. 4. Dispersión por una partícula esférica de radio. |
Logaritmos la fórmula de Guinier:
Así, de la expresión (2.8) se deduce que en el caso de representar la imagen SAS de un sistema monodisperso de partículas en coordenadas en coordenadas suficientemente pequeñas, se obtiene una dependencia lineal, a partir del ángulo de inclinación del cual es posible encontrar el radio de giro de las partículas.
En el caso de un sistema polidisperso, cuando las partículas tienen diferentes tamaños, la dependencia ya no será lineal. Sin embargo, como muestran los estudios, con suficiente monodispersidad de cada tipo de partículas y la ausencia de interferencia entre partículas en la imagen SAXS en coordenadas, se pueden distinguir varias regiones lineales. Al dividir estas regiones, se pueden encontrar los correspondientes radios de giro de diferentes tipos de partículas (Fig. 5).
A pesar de las ventajas enumeradas anteriormente para obtener información estructural, el método SXM tiene una serie de desventajas significativas.
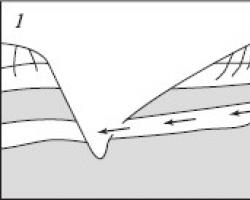
La doble reflexión de Bragg (DBR), que ocurre cuando los rayos X atraviesan materiales cristalinos, puede distorsionar significativamente el patrón SAXS. Un diagrama que explica la ocurrencia de RBS se muestra en la Fig. 6. Deje que el haz de rayos X primario caiga sobre un cristal de mosaico formado por bloques ligeramente desorientados. Si, por ejemplo, el bloque 1 es para s 0 en el ángulo de Bregg υ , entonces se reflejará un rayo s 1, que en su camino puede encontrarse con el bloque 2, ubicado en relación a s 1 en una posición reflectante, por lo que el haz se reflejará desde el bloque 2 s 2... Si son normales n 1 y n 2 a los planos reflectantes de ambos bloques están ubicados en el mismo plano (por ejemplo, en el plano del dibujo), luego el haz s 2 golpeará como el rayo s 1, en el lugar central P 0 radiografías. El bloque 2 también refleja cuando se da la vuelta. s 1 así que normal n 2 continúa formando un ángulo (π / 2) - υ con s 1, pero ya no se encuentra en el mismo plano con n 1 ... Luego, el rayo dos veces reflejado abandonará el plano del dibujo y se moverá a lo largo de la generatriz del cono, cuyo eje es s 1... Como resultado, en la película cerca del punto central P 0 aparecerá un trazo corto, que es una superposición de trazas de rayos dos veces reflejados.
| Fig. 6. Diagrama que explica la ocurrencia de la doble reflexión de Bragg. |
Los trazos RBS están orientados perpendicularmente a la línea. P 0 P conectando el punto central P 0 con un máximo de Bragg PAG; su longitud es mayor, mayor es el ángulo de mosaico del cristal.
No es difícil deshacerse del RBS al estudiar el SAX con un monocristal: basta con orientar este último respecto al haz primario para que ningún sistema de planos ( hkl) no estaba en una posición reflexiva.
Al estudiar policristales, es prácticamente imposible excluir DBT, ya que siempre habrá cristalitos que reflejen el haz primario. DBO estará ausente solo cuando se use radiación con una longitud de onda λ > d max (d max - la distancia interplanar más grande para un cristalito dado). Entonces, por ejemplo, en el estudio del cobre, uno debería usar Al K α- Radiación, que presenta importantes dificultades experimentales.
En ángulos de dispersión relativamente grandes ( ε > 10 "), el MUR no se puede separar del efecto RBS. ε < 2" la intensidad de SAX es un orden de magnitud mayor que la intensidad de RBS. En este caso, la separación de la verdadera SDS de la RBS se basa en la diferente naturaleza de las dependencias de la RBS y la RBS en la longitud de onda utilizada. Para ello se obtienen curvas de intensidad Yo (ε / λ) en dos radiaciones, por ejemplo, CrK α y CuK α... Si ambas curvas coinciden, esto indica que toda la dispersión se debe al efecto SAX. Si las curvas divergen de modo que en cada punto ε/λ la relación de intensidad resulta ser constante, entonces toda la dispersión se debe al RBS.
Cuando ambos efectos están presentes, entonces
I 1 = I 1 RBS + I 1 RBS; I 2 = I 2 RBS + I 2 RBS
B. Ya.Pines et al. ε 1 / λ 1 = ε 2 / λ 2
I 1 MUR / I 2 MUR = 1 y I 1 RBS / I 2 RBS = K,
I 2 RBS = (I 1 - I 2) ε 1 / λ 1 = ε 2 / λ 2 (K - 1),
donde constante PARA calculado teóricamente para cada caso específico.
El efecto DBO se puede utilizar para determinar los ángulos promedio de desorientación de bloques dentro de cristalitos o monocristales.
donde y son las intensidades SAX experimentales y corregidas, es el vector de difracción, es el ángulo de dispersión, es la longitud de onda; - coeficiente constante; - variable de integración. También debe tenerse en cuenta que la fórmula de Guinier se puede aplicar razonablemente solo en los casos en que la ausencia de interferencia de rayos dispersos por varias partículas, la simplicidad de las formas y la homogeneidad electrónica de las partículas de dispersión (esfera, elipse, placa en), de lo contrario, la dependencia no contendrá regiones lineales y el procesamiento de imágenes MUR se volverá mucho más complicado.
2.2. Análisis de la estructura de nanocompuestos por difracción de rayos X en ángulos grandes y pequeños.
Entre los métodos indirectos para determinar el tamaño de partícula, el lugar principal pertenece al método de difracción. Al mismo tiempo, este método es el más simple y accesible, ya que el estudio de rayos X de la estructura está muy extendido en todas partes y está bien provisto del equipo adecuado. Utilizando el método de difracción, junto con la composición de fase, los parámetros de la red cristalina, los desplazamientos estáticos y dinámicos de los átomos desde la posición de equilibrio y las microtensiones en la red, es posible determinar el tamaño de los granos (cristalitos).
La determinación por el método de difracción del tamaño de granos, partículas (o áreas de dispersión coherente) se basa en el cambio en la forma del perfil de reflexión de difracción con tamaño de grano decreciente. Cuando se habla de difracción, se entiende por dispersión coherente la dispersión de radiación difractada, en la que se satisfacen las condiciones de interferencia. En el caso general, el tamaño de un grano individual puede no coincidir con el tamaño de la región de dispersión coherente.
En los experimentos de difracción, los defectos estructurales se estudian ampliando las reflexiones de difracción de un policristal o polvo. Sin embargo, en la aplicación práctica de este método para determinar el tamaño de grano, a menudo se compara el ancho de los reflejos de difracción de una sustancia con un tamaño de grano grande (partículas) y de la misma sustancia en un nanoestado. Esta definición de ensanchamiento y la subsecuente estimación del tamaño de partícula promedio no siempre es correcta y puede dar un error muy grande (varios cientos por ciento). El punto es que el ensanchamiento debe determinarse con respecto a los reflejos de difracción de un cristal infinitamente grande. En realidad, esto significa que el ancho medido de las reflexiones de difracción debe compararse con el ancho instrumental, es decir, con el ancho de la función de resolución del difractómetro determinado de antemano en un experimento de difracción especial. Además, una determinación precisa del ancho de las reflexiones de difracción solo es posible reconstruyendo teóricamente la forma de la reflexión experimental. Es muy importante que puede haber otras razones físicas para el ensanchamiento de los reflejos de difracción, además del pequeño tamaño de los cristalitos. Por lo tanto, es importante no solo determinar la magnitud del ensanchamiento, sino también aislar su contribución debido precisamente al pequeño tamaño de las partículas.
Dado que el método de difracción para determinar el tamaño de partícula es el más extendido y disponible, consideraremos las características de su aplicación con más detalle.
El ancho de la línea de difracción puede depender de varias razones. Estos incluyen el pequeño tamaño de los cristalitos, la presencia de varios tipos de defectos, así como la heterogeneidad de las muestras en términos de composición química. El ensanchamiento causado por microesfuerzos y dislocaciones distribuidas caóticamente depende del orden de reflexión y es proporcional a tan υ. La cantidad de ensanchamiento causado por la falta de homogeneidad Δ NS; (o Δу), proporcional a (sen 2 υ) / cos υ. En el caso de las sustancias nanocristalinas, el ensanchamiento asociado al pequeño tamaño D de los cristalitos (D< 150 нм), причем в этом случае величина уширения пропорциональна seс υ. Рассмотрим вывод выражения, учитывающего уширение дифракционного отражения, обусловленное конечным размером частиц поликристаллического вещества.
Permitir
Consideremos el vector de dispersión s = 2sin υ / λ, donde λ es la longitud de onda de la radiación. Matemáticamente, su diferencial (o incertidumbre desde un punto de vista físico, ya que en el cristal final el vector de onda se convierte en un número cuántico malo) es
ds = ( 2.12)
En esta expresión, la cantidad d (2υ) es el ancho integral de la reflexión de difracción (línea) expresada en ángulos 2υ y medida en radianes. El ancho integral se define como la intensidad de la línea integral dividida por su altura y no depende de la forma de la línea de difracción. Esto permite utilizar el ancho integral para el análisis de un experimento de difracción de rayos X, sincrotrón o difracción de neutrones realizado en diferentes instalaciones con una función de resolución de difractómetro diferente y en diferentes intervalos angulares.
La incertidumbre del vector de dispersión ds es inversamente proporcional a la altura promediada en volumen de la columna de planos de dispersión coherentes.
dónde D(2) es el ancho integral de la línea de difracción. En la práctica, a menudo no se utiliza el ancho integral, sino el ancho completo a la mitad del máximo (FWHM) de la línea de difracción. La relación entre el ancho de línea integral y FWHM depende de la forma de la línea de difracción experimental y debe determinarse específicamente en cada caso específico. Para una línea en forma de rectángulo y triángulo, el ancho de la línea integral es exactamente FWHM. Para las funciones de Lorentz y Gauss, la relación se describe mediante las expresiones: D(2) L ≈ 1.6 ∙ FWHM L (2) y D(2) G ≈ 1.1 ∙ FWHM G (2), y para la pseudo-función de Voigt, que se considerará a continuación, esta relación es más complicada y depende de la relación de las contribuciones de Gauss y Lorentz. Para líneas de difracción en ángulos pequeños, la relación entre el ensanchamiento integral y FWHM puede tomarse igual a d (2) ≈ 1,47 ∙ FWHM (2); sustituyendo esta relación en (2.13), obtenemos la fórmula de Debye:
En el caso general, cuando las partículas de una sustancia tienen una forma arbitraria, el tamaño de partícula promedio se puede encontrar usando la fórmula de Debye-Scherrer:
donde es la constante de Scherrer, cuyo valor depende de la forma de la partícula (cristalita, dominio) y de los índices ( hkl) Reflexión por difracción.
En un experimento real, debido a la resolución finita del difractómetro, la línea se ensancha y no puede ser menor que el ancho de la línea instrumental. En otras palabras, en la fórmula (2.15) no se debe usar el ancho FWHM (2υ) de la reflexión, sino su ensanchamiento. β en relación con el ancho instrumental. Por lo tanto, en un experimento de difracción, el tamaño de partícula promedio se determina mediante el método de Warren:
donde es el ensanchamiento de la reflexión de difracción. Darse cuenta de .
El ancho total a la mitad del máximo FWHM R o el ancho del instrumento del difractómetro se puede medir en una sustancia (polvo) bien recocida y completamente homogénea con un tamaño de partícula de 1-10 µm. En otras palabras, la referencia debe tomarse como una reflexión sin ningún ensanchamiento adicional salvo el ensanchamiento instrumental. Si la función de resolución del difractómetro está descrita por la función gaussiana, y υ R es su segundo momento, entonces FWHM R = 2.355υ R.
Las reflexiones de difracción se describen mediante funciones gaussianas g (υ) y Lorenz l (υ):
, (2.17)
o su superposición V l() + (1-c) g () es la pseudofunción de Voigt:
donde es la contribución relativa de la función de Lorentz a la intensidad de reflexión total; parámetros de las distribuciones de Lorentz y Gauss; A es el factor de normalización.
Considere las características de las distribuciones de Gauss y Lorentz, que se necesitan a continuación. Para una distribución gaussiana, el parámetro es el segundo momento de la función. El segundo momento, expresado en ángulos, está relacionado con el ancho total a la mitad de la altura, medido en las esquinas 2, mediante la relación conocida () = FWHM (2) / (2 · 2.355). Esta relación se puede obtener fácilmente directamente de la distribución gaussiana. En la Fig. 6a muestra la distribución gaussiana descrita por la función
donde es el segundo momento de la función gaussiana, es decir, el valor del argumento correspondiente al punto de inflexión de la función, cuando. Encontremos el valor al que la función (2.20) toma un valor igual a la mitad de su altura. En este caso y de donde. Como se ve en la Figura 6a, el ancho total de la función gaussiana a la mitad del máximo es.
Para la distribución de Lorentz, el parámetro coincide con la mitad del ancho de esta función a la mitad de la altura. Deje que la función de Lorentz,
toma un valor igual a la mitad de la altura, es decir (Fig. 6 b). El valor del argumento, que corresponde a este valor de la función, se puede encontrar en la ecuación
de donde y. Por lo tanto, es válido para la función de Lorentz. El segundo momento de la función de Lorentz, es decir, el valor del argumento correspondiente al punto de inflexión de la función, se puede encontrar a partir de la condición. El cálculo muestra que el segundo momento de la función de Lorentz es.
La pseudo-función de Voigt (2.19) proporciona la mejor descripción de la reflexión de difracción experimental en comparación con las funciones de Gauss y Lorentz.
Teniendo esto en cuenta, representamos la función de resolución del difractómetro como la pseudofunción de Voigt; Para simplificar la notación, asumimos que en (2.19) A = 1. Luego
Dado que la función de resolución es una superposición de las funciones de Lorentz y Gauss, en la aproximación cero su ancho se puede aproximar mediante la expresión
Si, entonces. Supongamos que alguna función gaussiana efectiva, cuyo área coincide con el área de la pseudo-función de Voigt, tenga un ancho igual a, entonces, el segundo momento de dicha función. Por tanto, la función de pseudoresolución de Voigt y la función gaussiana efectiva son equivalentes en ancho medio. Esto permite, en la aproximación cero, reemplazar la función (2.22) por la función
donde siempre que.
La función experimental que describe la forma de una reflexión de difracción arbitraria es la convolución de la función de distribución y la función de resolución (2.24), es decir,
De (2.25) está claro que el segundo momento de la función experimental. (2,26)
El ensanchamiento β de la reflexión por difracción se expresa en términos del ancho total de la reflexión a la mitad del máximo como. Si los segundos momentos y el ancho total se expresan en las mismas unidades (todos en las esquinas o todos en los ángulos 2), entonces el ampliación del reflejo hkl) es igual a
Como ya se señaló, los ensanchamientos causados por tamaños de grano pequeños, deformaciones y falta de homogeneidad son proporcionales a sec, tan y (sin) 2 / cos, respectivamente; por lo tanto, debido a la diferente dependencia angular, se pueden distinguir tres tipos diferentes de ensanchamientos . Debe tenerse en cuenta que el tamaño de las regiones de dispersión coherente, determinado a partir del ensanchamiento dimensional, puede corresponder al tamaño de partículas individuales (cristalitos), pero también puede reflejar la estructura del subdominio y caracterizar la distancia promedio entre fallas de apilamiento o la tamaño efectivo de bloques de mosaico, etc. Además, debe tenerse en cuenta que la forma de la reflexión de difracción depende no solo del tamaño, sino también de la forma de las nanopartículas. En nanomateriales no monofásicos, una distorsión notable de la forma de las líneas de difracción observadas puede ser una consecuencia de la superposición de reflejos de difracción de varias fases.
Consideremos cómo se puede separar el ensanchamiento causado por varios factores diferentes utilizando el ejemplo de soluciones sólidas de carburo nanoestructurado del sistema Zr C - Nb C. Un estudio de rayos X de estas soluciones sólidas reveló que los reflejos de difracción en los rayos X patrones de difracción de muestras (ZrC) 0,46 (NbC) 0,54 fuertemente ensanchados. Se sabe que estas soluciones sólidas tienen tendencia a descomponerse en estado sólido; sin embargo, según los datos de rayos X, las muestras eran monofásicas. Para aclarar las razones del ensanchamiento de las reflexiones (inhomogeneidad, tamaño de grano pequeño o deformación), se realizó un análisis cuantitativo del perfil de reflexión de difracción utilizando la pseudofunción de Voigt (2.19). El análisis realizado mostró que el ancho de todas las reflexiones de difracción excede significativamente el ancho de la función de resolución del difractómetro.
En una red cristalina cúbica, los cristalitos son del mismo orden de magnitud en tres direcciones perpendiculares. En este caso, para cristales con simetría cúbica, el coeficiente reflexiones con diferentes índices cristalográficos de Miller (hkl) celosía cristalina cúbica, se puede calcular mediante la fórmula
Las distorsiones por deformación y los desplazamientos no homogéneos resultantes de los átomos de los sitios de la red pueden surgir cuando las dislocaciones se organizan al azar en la mayor parte de la muestra. En este caso, los desplazamientos de los átomos están determinados por la superposición de los desplazamientos de cada dislocación, lo que puede considerarse como un cambio local en las distancias interplanar. En otras palabras, la distancia entre los planos cambia continuamente desde (d 0 -Δd) antes de (d 0 + Δd) (d 0 y Δd es la distancia interplanar en un cristal ideal y el cambio promedio en la distancia entre los planos (hkl) en volumen V cristal, respectivamente). En este caso, la cantidad ε = Δd / d 0 hay una microdeformación de la red, que caracteriza el valor de la deformación uniforme promediada sobre el cristal. El máximo de difracción de las regiones del cristal con un espaciado interplanar cambiado surge en un ángulo , ligeramente diferente del ángulo o para un cristal ideal y, como resultado, se produce un ensanchamiento de la reflexión. La fórmula para el ensanchamiento de línea asociado con la microdeformación de la red se puede derivar fácilmente diferenciando la ecuación de Wolfe-Bragg :; Ampliación de línea a un lado del máximo de línea correspondiente al espaciado interplanar D, cuando la distancia interplanar se cambia en + Δd igualmente, y al cambiar a - (Fig.6a), las funciones de resolución de un difractómetro de rayos X se determinaron en experimentos especiales en compuestos recocidos de grano grueso que no tenían una región de homogeneidad (gran tamaño de grano, ausencia de deformaciones distorsiones, y uniformidad de la composición de la muestra excluyó el ensanchamiento de los reflejos): un monocristal de carburo hexagonal de silicio 6H-SiC y carburo de tungsteno estequiométrico WC. Comparación de los valores encontrados; c - dependencia del ensanchamiento experimental de las reflexiones de difracción de la muestra (ZrC) 0,46 (NbC) 0,54 de
Guinier A., Fournet G. Dispersión de rayos X en ángulo pequeño. Nueva York-Londres: J. Wiley and Sons. Chapman y Hall Ltd. 1955.
Ignatenko P.I., Ivanitsyn N.P. Difracción de rayos X de cristales reales. - Donetsk: DGU, 2000 .-- 328 p.
Rusakov, A.A. Rentgenografía de metales - M .: Atomizdat, 1977 .-- 479 p.
Gusev A.I. Nanomateriales, nanoestructuras, nanotecnología. - M .: FIZMATLIT, 2005 .-- 416 p.
MOU SOSH №21
Resumen de física
DISPERSIÓN DE RAYOS X
SOBRE MOLÉCULAS FULLERENAS "
He hecho el trabajo
alumno 11 clase "G"
Lykov Vladimir Andreevich
Maestro:
Kharitonova Olga Alexandrovna
3.5. Difracción de rayos X de Fraunhofer por átomos de cristal38
1. Simulación por computadora de la dispersión de rayos X por moléculas de fullereno y fragmentos de cristales de fullerita.
2. Investigación de la pseudosimetría rotatoria de la distribución angular de la intensidad de los rayos X dispersos.
Considere un movimiento periódico unidimensional de un punto material. La frecuencia de movimiento significa que la coordenada del punto x es una función periódica del tiempo t:
En otras palabras, para cualquier momento la igualdad
f (t + T) = f (t), (1.2)
donde el valor constante T se denomina período de oscilación.
Es fundamental que la coordenada no solo pueda ser cartesiana, sino también un ángulo, etc.
Hay muchos tipos de movimientos periódicos. Por ejemplo, tal es el movimiento uniforme de un punto material a lo largo de un círculo.
Figura 1.3. Una bola suspendida de un hilo.
Figura 1.4. Flotar sobre la superficie del líquido.
Figura 1.5. Tubo en forma de U con líquido.
Figura 1.6. Un circuito eléctrico que contiene un condensador con capacitancia C y una bobina con inductancia L.
Ejemplo 1.3. el ángulo de deflexión cambia periódicamente. Finalmente, en el ejemplo 1.6. la carga del condensador y la corriente en la bobina cambian periódicamente. Sin embargo, todos estos procesos físicos están descritos por las mismas funciones matemáticas.
El tipo de vibración más simple es el armónico. La coordenada de un punto material a lo largo del tiempo con oscilaciones armónicas cambia de acuerdo con la ley.
x (t) = Acos (peso + j0) (1.3)
donde A es la amplitud de desplazamiento (el desplazamiento máximo de un punto desde la posición de equilibrio), w es la frecuencia asociada con el período por la relación
w = 2p / T. (1,4)
La posición de equilibrio es la ubicación de un punto material en el que la suma de las fuerzas que actúan sobre él es igual a cero.
El argumento del coseno wt + j0 en la función (1.3) se llama fase de oscilación. Se ve que la fase es una cantidad adimensional y una función lineal del tiempo. El valor constante j0 se llama fase inicial.
Oscilaciones de los sistemas físicos que se muestran en la Figura 1.1. - 1.6. realizaría oscilaciones estrictamente armónicas en las siguientes condiciones adicionales:
Sistema 1.1. - en ausencia de resistencia al aire, sistema 1.2. - en ausencia de espinas, sistema 1.3. - en pequeños ángulos y sin resistencia al aire, sistemas 1.4. y 1.5. - en ausencia de viscosidad del fluido, sistema 1.6. - en ausencia de resistencia activa de la bobina y los cables.
Consideremos, por simplicidad, las primeras oscilaciones armónicas unidimensionales, cuando un punto material se desplaza a lo largo de una línea recta.
Calculando la derivada del tiempo de la función (1.3), obtenemos la velocidad del punto material:
v (t) = -wAsin (peso + j0) (1.5)
Puede verse que la velocidad también es una función periódica del tiempo.
Ahora tomamos la derivada del tiempo de la función (1.5) y obtenemos la aceleración del punto material.
a (t) = -w2 Acos (peso + j0) (1.6)
Comparando las funciones (1.3) y (1.6), obtenemos que la coordenada y la aceleración están relacionadas por la siguiente expresión
a (t) = -w2 x (t), (1.7)
que se ejecuta en cualquier momento.
En otras palabras, para cualquier oscilación armónica unidimensional, la aceleración de una partícula es directamente proporcional a su coordenada y el coeficiente de proporcionalidad es negativo.
Figura 1.7. Dependencias temporales de la coordenada (círculos), la velocidad (cuadrados) y la aceleración (triángulos) de una partícula que realiza oscilaciones armónicas unidimensionales. Amplitudes А = 2, período Т = 5, fase inicial j0 = 0.
Como sabe, la aceleración de una partícula (según la ley básica de la dinámica) es directamente proporcional a la fuerza que actúa sobre la partícula. En consecuencia, si la fuerza es directamente proporcional a la coordenada con el signo opuesto, entonces la partícula realizará una vibración armónica. Tales fuerzas se denominan reconstituyentes.
Un ejemplo importante de fuerza restauradora es la fuerza de Hooke (fuerza elástica). Por tanto, si la fuerza de Hooke actúa sobre un punto material, entonces el punto realiza vibraciones armónicas.
Dado que estamos considerando oscilaciones unidimensionales, para analizar el problema basta con proyectar el vector de fuerza de Hooke sobre un eje paralelo a esta fuerza. Si se elige el cero de la coordenada x en el punto en el que la fuerza de restauración es cero, entonces la proyección de la fuerza es
donde el coeficiente k se llama rigidez.
Comparando las ecuaciones (1.7) y (1.8), y usando la segunda ley de Newton, obtenemos una expresión importante para la frecuencia de vibración:
Esto significa que la frecuencia de vibración está descrita por los parámetros del sistema físico y no depende de las condiciones iniciales. En particular, la expresión (1.9) determina la frecuencia de oscilaciones armónicas de los sistemas que se muestran en la Figura 1.1. y 1.2.
Como ejemplo instructivo, considere los movimientos unidimensionales que se realizan mediante pesos unidos a los resortes (consulte la Figura 1.8).
Figura 1.8. Pesas de primavera.
Dejemos que las masas de los resortes sean insignificantes en comparación con las masas de los pesos.
Las cargas se consideran puntos materiales.
Primero, considere el sistema que se muestra en la Figura 18. una. Supongamos que inicialmente el peso se desplazó hacia la izquierda y, como resultado, el resorte se estiró. En este caso, 3 fuerzas actúan sobre la carga (punto material): la fuerza de gravedad mg, la fuerza elástica F y la fuerza de reacción normal del soporte N. Despreciamos la fricción en este problema (ver Fig. 1.9).
Gráfico 1.9. Fuerzas sobre una carga que descansa sobre un soporte liso cuando se estira el resorte.
Escribamos la segunda ley de Newton para el cuerpo que se muestra en la figura 1.9.
ma = mg + F + N (1,10)
La fuerza elástica en pequeñas deformaciones de los resortes se describe mediante la ley de Hooke
F = - kd (1,11)
donde d es el vector de deformación del resorte, k es el coeficiente de rigidez del resorte.
Tenga en cuenta que cuando la carga se mueve, la tensión del resorte se puede reemplazar por compresión. En este caso, el vector de deformación d cambiará su dirección a la opuesta, por lo que ocurrirá lo mismo con la fuerza de Hooke (1.11). De esto, en particular, se deduce que con la compresión inicial del resorte, la ecuación vectorial de movimiento (1.10) tendrá la misma forma:
ma = mg - kd + N (1.12)
Elijamos el origen de las coordenadas en el punto donde se ubica el peso con un resorte no deformado. El eje X se dirige horizontalmente, el eje Y, verticalmente, es decir perpendicular al soporte (ver Figura 1.9).
Dado que la carga se mueve horizontalmente a lo largo del soporte, la proyección de la aceleración en el eje Y es cero. Entonces, la fuerza de la gravedad se compensa completamente con la reacción normal del soporte.
N + mg = 0 (1,13)
La proyección de la ecuación de movimiento (1.12) sobre el eje X da la ecuación escalar:
ma = - kd, (1,14)
donde a es la proyección horizontal de la aceleración de la carga, d es la proyección del vector de deformación del resorte.
En otras palabras, la aceleración se dirige a lo largo del eje X horizontal y es igual a
a = - (k / m) d (1,15)
Note una vez más que la ecuación (1.15) es válida tanto para la tensión como para la compresión del resorte.
Dado que el origen de las coordenadas se elige para que coincida con el final del resorte no deformado, la proyección de la deformación coincide con el valor de la coordenada horizontal de la carga x:
a = - (k / m) x (1,16)
Por definición, la proyección de la aceleración es igual a la derivada del segundo tiempo de la coordenada correspondiente. En consecuencia, la ecuación de movimiento unidimensional (1.16) se puede reescribir como
En otras palabras, la proyección de la aceleración es directamente proporcional a la coordenada y el coeficiente de proporcionalidad tiene signo negativo.
La ecuación (1.17) es una diferencial de segundo orden, la teoría general para resolver tales ecuaciones se estudia en el curso del análisis matemático. Sin embargo, es fácil probar mediante sustitución directa que la función de vibración armónica (1.3) satisface la ecuación (1.17). Como ya se demostró anteriormente, la frecuencia de vibración se expresa mediante la fórmula (1.9).
La amplitud A y la fase inicial j0 de las oscilaciones se determinan a partir de las condiciones iniciales.
Suponga que inicialmente la carga se desplazó a la derecha de la posición de equilibrio una distancia d0 y que la velocidad inicial de la carga es cero. Luego, usando las funciones (1.3) y (1.5), escribimos las siguientes ecuaciones para el tiempo t = 0:
d0 = Acos (j0) (1,18)
0 = -wAsin (j0) (1,19)
La solución del sistema (1.18) - (1.19) son los siguientes valores A = d0 y j0 = 0.
Para otras condiciones iniciales, las cantidades A y j0 adquirirán naturalmente otros valores.
Ahora considere el sistema que se muestra en la Figura 1.8. B. En este caso, solo dos fuerzas actúan sobre la carga: la fuerza de gravedad mg y la fuerza de elasticidad F (ver Figura 1.10). Es evidente que en la posición de equilibrio estas fuerzas se anulan entre sí, por lo que el resorte se estira.
Deje que la carga se mueva ligeramente verticalmente. Entonces la ecuación vectorial de movimiento tendrá una forma similar a la ecuación (1.12)
ma = mg - kd (1,20)
además, independientemente de la dirección del desplazamiento vertical (hacia arriba o hacia abajo).
Todos los vectores de la ecuación (1. 20) están dirigidos verticalmente, por lo que es aconsejable proyectar esta ecuación en el eje de coordenadas vertical. Dirijamos el eje hacia abajo y seleccionemos el origen de las coordenadas en el punto donde el cuerpo está en equilibrio (ver Figura 1.10).
Figura 1.10. Fuerzas que actúan sobre una carga que cuelga de un resorte.
Al proyectar (1.18) sobre el eje X, obtenemos:
a = g - (k / m) d (1.21)
donde a es la proyección de la aceleración del cuerpo, d es la proyección de la deformación del resorte.
Para resolver la ecuación (1.21), es útil volver a la posición de equilibrio de la carga. La ecuación de Newton para esta posición es:
0 = g - (k / m) d0 (1.22)
donde d0 es la deformación del resorte cuando la carga está en equilibrio. Por tanto, el vector d0 es igual a
Se puede ver que en la posición de equilibrio del cuerpo, el resorte está realmente estirado, ya que el vector d0 se dirige paralelo al vector g, es decir, camino hacia abajo.
Ahora colocamos el origen en el punto de equilibrio de la carga sobre el resorte, y luego la ecuación (1.21) tomará la forma:
a = g - (k / m) (x + d0) (1.24)
donde d0 es el módulo del vector de deformación del resorte d0.
Sustituyendo en la ecuación (1.24) el valor d0 obtenido de la relación (1.23), obtenemos:
a = g - (k / m) (x + (m / k) g)
a = - (k / m) x (1,25)
La ecuación resultante coincide completamente con la ecuación (1.16). Por lo tanto, el cuerpo que se muestra en la Figura 1.8. b, también realiza un movimiento oscilatorio armónico, descrito por la función (1.3), como la carga en el sistema que se muestra en la Figura 1.8. una. Frecuencia de oscilación La única diferencia está en la dirección de oscilación (vertical en lugar de horizontal). Pero la frecuencia de vibración todavía está determinada por la rigidez del resorte y la masa de la carga por la fórmula (1.9).
Es característico que la deformación inicial del resorte en el sistema de la Figura 1.8. b no afecta la frecuencia de vibración.
Considere un ejemplo de ondas sonoras cuando dos fuentes crean ondas con las mismas amplitudes A y frecuencias ω. Instale una membrana sensible a una distancia de las fuentes. Cuando la onda "recorre" la distancia desde la fuente hasta la membrana, la membrana comenzará a oscilar. El impacto de cada una de las ondas en la membrana se puede describir mediante las siguientes relaciones utilizando funciones vibratorias:
x1 (t) = A cos (ωt + φ1),
x2 (t) = A cos (ωt + φ2).
x (t) = x1 (t) + x2 (t) = A (1.27)
La expresión entre paréntesis se puede escribir de manera diferente usando la función trigonométrica de la suma de cosenos:
Para simplificar la función (1.28), introducimos nuevas cantidades A0 y φ0 que satisfacen la condición:
A0 = φ0 = (1,29)
Sustituyendo las expresiones (1.29) en la función (1.28), obtenemos
Por tanto, la suma de vibraciones armónicas con las mismas frecuencias ω es una vibración armónica de la misma frecuencia ω. En este caso, la amplitud de la oscilación total A0 y la fase inicial φ0 están determinadas por las relaciones (1.29).
Consideremos ahora la misma situación, cambiando las amplitudes de oscilación en función (1.26). La función x1 (t) tiene la amplitud A reemplazada por A1, y la función x2 (t) A por A2. Entonces las funciones (1.26) se pueden escribir de la siguiente forma
x1 (t) = A1 cos (ωt + φ1), x2 (t) = A2 cos (ωt + φ2); (1,31)
Encontremos la suma de funciones armónicas (1.31)
x = x1 (t) + x2 (t) = A1 cos (ωt + φ1) + A2 cos (ωt + φ2) (1.32)
La expresión (1.32) se puede escribir de manera diferente, usando la función trigonométrica del coseno de la suma:
x (t) = (A1cos (φ1) + A2cos (φ2)) cos (ωt) - (A1sin (φ1) + A2sin (φ2)) sin (ωt) (1.33)
Para simplificar la función (1.33), introducimos nuevas cantidades A0 y φ0 que satisfacen la condición:
Elevemos al cuadrado cada ecuación del sistema (1.34) y sumamos las ecuaciones resultantes. Entonces obtenemos la siguiente relación para el número A0:
Considere la expresión (1.35). Demostremos que la cantidad debajo de la raíz no puede ser negativa. Dado que cos (φ1 - φ2) ≥ –1, esta es la única cantidad que puede afectar el signo del número bajo la raíz (A12> 0, A22> 0 y 2A1A2> 0 (de la definición de amplitud)). Considere el caso crítico (el coseno es igual a menos uno). Debajo de la raíz está la fórmula del cuadrado de la diferencia, que siempre es positiva. Si comenzamos a aumentar gradualmente el coseno, entonces el término que contiene el coseno también comenzará a crecer, entonces el valor debajo de la raíz no cambiará su signo.
Ahora calculamos la razón para la cantidad φ0 dividiendo la segunda ecuación del sistema (1.34) por la primera y calculando la arctangente:
Y ahora sustituimos en la función (1.33) los valores del sistema (1.34)
x = A0 (cos (φ0) cosωt - sin (φ0) sinωt) (1.37)
Transformando la expresión entre paréntesis según la fórmula del coseno de la suma, obtenemos:
x (t) = A0 cos (ωt + φ0) (1.38)
Y nuevamente resultó que la suma de dos funciones armónicas de la forma (1.31) también es una función armónica de la misma forma. Más precisamente, la adición de dos vibraciones armónicas con la misma frecuencia ω es también una vibración armónica con la misma frecuencia ω. En este caso, la amplitud de la oscilación resultante está determinada por la relación (1.35) y la fase inicial, por la relación (1.36).
Considere las fluctuaciones en el entorno material. Un ejemplo es la oscilación de un flotador en la superficie del agua. Si un pájaro que vuela sobre el flotador actúa como observador, notará que el flotador forma círculos a su alrededor, que, sorprendentemente, aumentan el radio con el tiempo, alejándose. Pero si en el papel de un observador hay una persona parada en la orilla, verá "jorobas" y "depresiones", que se acercan alternativamente a la orilla. Este fenómeno se llama onda viajera.
Arroz. 2.1. Representación esquemática de una onda de corte.
Vemos que el motivo del movimiento es la bola # 1, es decir flotador. Con la ayuda de la interacción, pone en movimiento la bola n. ° 2, la pelota n. ° 2 involucra a la pelota n. ° 3, y así sucesivamente. Pero la interacción entre las partículas no ocurre instantáneamente, por lo que la bola n. ° 2 se retrasará en el tiempo. También puede notar que la bola n. ° 13 oscila de la misma manera que la n. ° 1. Entonces podemos concluir que la bola n. ° 2 quedará rezagada con respecto a la n. ° 1 en 1/12 del período.
Por lo tanto, el período de la onda (T) es el período de oscilación de la bola # 1, la amplitud de la onda (A) es la desviación máxima de la bola del eje horizontal y la longitud de onda (λ) es la mínima. distancia entre los picos de las jorobas más cercanas o los mínimos de las depresiones más cercanas.
En el ejemplo considerado anteriormente, la onda se propagó perpendicularmente a las oscilaciones de la fuente, es decir, se consideró una onda transversal.
Las ondas longitudinales son ondas que se propagan en paralelo al movimiento de la fuente. Si consideramos las ondas longitudinales de forma esquemática (figura 2.2), entonces podemos ver que con el tiempo la fuente de oscilaciones (bola n. ° 1) oscila de izquierda a derecha e involucra al resto de las partículas en el mismo movimiento oscilatorio. Entonces, para una onda longitudinal, la definición del período de onda descrita anteriormente permanecerá sin cambios, y las definiciones de longitud de onda y amplitud se verán diferentes. Los conceptos generalizados se verán así: longitud de onda: la distancia mínima entre bolas que se mueven con las mismas fases; amplitud de onda: desviación máxima de la posición de equilibrio.
Considere una fuente que realiza oscilaciones armónicas en un medio material con una frecuencia w. Entonces, su movimiento se describe en función de la especie. Sea la fase inicial j0 cero. Entonces, la coordenada de origen es la siguiente función del tiempo.
x = Acos (peso) (2.1)
Debido a la interacción, las partículas del entorno están involucradas en movimiento, que también serán vibraciones armónicas. Pero la interacción entre partículas no ocurre instantáneamente, por lo tanto, las oscilaciones de las partículas vecinas ocurrirán con un cambio en el tiempo. Debido a la velocidad de transmisión finita y constante de la interacción, este cambio de oscilaciones en el tiempo es directamente proporcional a la distancia de la siguiente partícula a la fuente.
De los ejemplos anteriores se deduce que, como resultado, las perturbaciones denominadas perturbaciones de las olas se propagarán en el medio. En el caso de las ondas superficiales, esta perturbación es la desviación de las partículas de agua de la superficie en un estado inactivo. En el caso de las ondas sonoras, la perturbación es la desviación de la densidad del aire de la densidad media del aire en reposo. Independientemente del tipo de ondas (longitudinales o transversales), esta perturbación debe ser descrita por alguna función de tiempo y coordenadas.
En el punto de origen, la perturbación es una función del tiempo, que coincide con (2.1)
y (0, t) = Acos (peso). (2,2)
Considere la propagación de una perturbación armónica en la dirección especificada por el eje de coordenadas 0Z. De acuerdo con lo anterior, las partículas del entorno material, ubicadas a una distancia z de la fuente, realizan oscilaciones armónicas con un desfase de tiempo (debido a la velocidad finita de propagación de la interacción). Por lo tanto, la perturbación en el punto zy en un momento de tiempo arbitrario t coincide con la perturbación en el punto z = 0 de la fuente en algún momento de tiempo anterior t ¢
y (z, t) = y (0, t ¢) (2.3)
La velocidad de propagación de una perturbación en un medio dado se expresa claramente por la velocidad de movimiento de la joroba (o depresión) de las ondas superficiales o la velocidad de movimiento de la compactación (o rarefacción) de una onda de sonido. Esta velocidad vf se llama velocidad de fase de la onda. Así, una joroba, depresión o cualquier otro tipo de perturbación del medio cubre la distancia z en el tiempo z / vf.
La velocidad de fase permite conectar los momentos de tiempo t ¢ yt por la siguiente relación
Usando las relaciones (2.2) - (2.4), obtenemos una expresión para la función de perturbación en la siguiente forma:
La expresión resultante se llama función de onda armónica o, en resumen, onda armónica.
En el caso de medios homogéneos y pequeñas perturbaciones, la velocidad de fase es constante.
Introducimos una nueva cantidad llamada número de onda, la siguiente relación:
k = ω / vf (2.6)
Con la ayuda del número de onda, la función de onda armónica (2.5) se puede escribir en la forma:
y (z, t) = A cos (ωt - kz) (2.7)
Considere la cantidad A. Esta cantidad es la amplitud de la onda. Como ya se mencionó, la amplitud de onda es la desviación máxima de una partícula de la posición de equilibrio. La amplitud de la onda puede cambiar con el tiempo (debido a la influencia de fuerzas externas).
La fase de la onda es el valor bajo el signo de la función trigonométrica. Dependiendo de las condiciones iniciales, la fase de la función de onda puede contener un término constante j0 ¹ 0. La fase de la onda es una función de dos argumentos, tiempo y coordenada.
Tenga en cuenta que la función (2.8) describe un proceso de ondas que es infinito en el espacio y el tiempo.
Consideremos el significado físico de la cantidad k. Elijamos el momento t = 0. La función de onda (2.8) tomará la forma:
La función (2.9) se puede interpretar como una fotografía instantánea del proceso ondulatorio. Se ve que esta función es periódica en el espacio.
De acuerdo con la definición del período, la siguiente igualdad es válida para cualquier valor de la coordenada z
A Cos (k (z + l)) = A Cos (k z)
La cantidad l se llama longitud de onda. Representa la distancia mínima entre puntos con la misma fase (jorobas, valles, etc.).
Si los cosenos son iguales, entonces los argumentos difieren en 2π
k (z + l) = kz + 2π (2.9)
Mediante transformaciones simples obtenemos la siguiente expresión:
λ = 2π / k (2,10)
Por tanto, se deduce que el valor de k es inversamente proporcional a la longitud de onda λ.
Considere el conjunto de puntos en el espacio en los que la fase de la onda permanece igual a cero.
peso - kz = 0 (2.11)
La transformación algebraica da:
La relación z / t de la izquierda se definió anteriormente como la velocidad de fase. Según (2.13), la velocidad de fase de una onda armónica plana es
También se ve en la relación (2.15) que para una onda viajera armónica en un instante de tiempo fijo, la tasa de aumento de fase por unidad de longitud es la cantidad k (número de onda) igual a
k = w / vF (2,14)
Un ejemplo de ondas armónicas se consideró anteriormente. Pero en la naturaleza, estas ondas son muy raras. Las olas amortiguadas son más comunes, es decir, ondas en las que la velocidad (debido a la resistencia del aire, fuerzas de fricción u otras fuerzas disipativas) desaparece con el tiempo. Las funciones que obtuvimos anteriormente no son válidas para ondas amortiguadas.
Arriba, consideramos ondas que se propagan a lo largo de la interfaz entre dos medios y ondas que se propagan en la mayor parte de la materia. Por ejemplo, solo las ondas sonoras longitudinales pueden propagarse en el aire, y tanto las ondas longitudinales como las transversales pueden propagarse en el metal.
Además, las ondas se pueden distinguir por la forma de la superficie de fase constante. Las ondas planas y esféricas son casos especiales importantes.
Se sabe que un campo magnético cambiante genera uno eléctrico. Si asumimos que un campo eléctrico cambiante genera un campo magnético, entonces podemos asumir, como hizo Maxwell, que se generará una onda electromagnética debido a esto. Y solo más tarde, en 1886, Hertz demostró experimentalmente que Maxwell tenía razón. Hertz en sus experimentos, reduciendo el número de vueltas de la bobina y el área de las placas del condensador, así como separándolas, hizo la transición de un circuito oscilatorio cerrado a un circuito oscilatorio abierto (vibrador Hertz), que es de dos varillas. separados por un espacio de chispa. Si en un circuito oscilatorio cerrado se concentra un campo eléctrico alterno dentro de un condensador, entonces en un circuito abierto llena el espacio que rodea al circuito, lo que aumenta significativamente la intensidad de la radiación electromagnética. Las oscilaciones en tal sistema son soportadas por e. de una fuente conectada a las placas del condensador, y el espacio de chispa se utiliza para aumentar la diferencia de potencial a la que se cargan inicialmente las placas. Para excitar ondas electromagnéticas, el vibrador Hertz 8 se conectó a un inductor. Cuando el voltaje a través del espacio de chispas alcanzó el valor de ruptura, apareció una chispa y surgieron oscilaciones amortiguadas libres en el vibrador. Cuando la chispa desapareció, el circuito se abrió y las oscilaciones se detuvieron. Luego, el inductor cargó nuevamente el capacitor, apareció una chispa y nuevamente se observaron oscilaciones en el circuito, etc. Para registrar ondas electromagnéticas, Hertz usó otro vibrador con la misma frecuencia natural que el vibrador emisor, es decir, sintonizado en resonancia con el vibrador. Cuando las ondas electromagnéticas alcanzaron el resonador, una chispa eléctrica saltó en su espacio.
Con la ayuda del vibrador descrito, Hertz alcanzó frecuencias del orden de 100 MHz y recibió ondas, cuya longitud fue de aproximadamente 3 m.P.N. Lebedev, usando un vibrador en miniatura hecho de varillas delgadas de platino, recibió ondas electromagnéticas milimétricas con una longitud de onda λ = 6-4 mm. Así es como se descubrieron experimentalmente las ondas electromagnéticas. Hertz también demostró que la velocidad de una onda electromagnética es igual a la velocidad de la luz:
Luego se demostró que las ondas electromagnéticas son transversales. Las cargas oscilantes son la fuente de ondas electromagnéticas. En el espacio que rodea la carga, surge un sistema de campos eléctricos y magnéticos. En la Figura 2.3 se muestra una instantánea de dicho sistema de campos.
Una característica cualitativa de las oscilaciones electromagnéticas se puede dar tanto en forma de frecuencia de oscilación, expresada en hercios, como en longitudes de onda. Cuanto mayor sea la frecuencia de vibración, más corta será la longitud de onda propagada. El espectro completo de estas ondas se divide convencionalmente en los siguientes 16 rangos:
Longitud de onda | Nombre | Frecuencia |
| más de 100 km | Vibraciones eléctricas de baja frecuencia. | 0-3 kHz |
| 100 kilómetros - 1 mm | Ondas de radio | 3 kHz - 3 THz |
| 100-10 kilometros | miriámetro (frecuencias muy bajas) | 3 - 3 kHz |
| 10 - 1 km | kilómetro (bajas frecuencias) | 30 - 300 kHz |
| 1 km - 100 m | hectómetro (frecuencias medias) | 300 kHz - 3 MHz |
| 100 - 10 m | decámetro (altas frecuencias) | 3 - 30 MHz |
| 10 - 1 m | metro (frecuencias muy altas) | 30 - 300 MHz |
| 1 metro - 10 cm | decímetro (ultra alto) | 300 MHz - 3 GHz |
| 10-1 cm | centímetro (ultra alto) | 3 - 30 GHz |
| 1 cm - 1 mm | milímetro (extremadamente alto) | 30 - 300 GHz |
| 1 - 0,1 mm | decimilímetro (hiperalto) | 300 GHz - 3 THz |
| 2 mm - 760 nm | Radiación infrarroja | 150 GHz - 400 THz |
| 760 - 380 nm | Radiación visible (espectro óptico) | 400 - 800 THz |
| 380 - 3 millas náuticas | Radiación ultravioleta | 800 THz - 100 PHz |
| 10 millas náuticas - 1:00 p. M. | Radiación de rayos X | 30 PHz - 300 EHz |
| <=10 пм | Radiación gamma | > = 30 EHz |
Las ondas de luz son uno de los tipos más comunes de ondas electromagnéticas. Pero en nuestro trabajo consideraremos otro tipo de ondas electromagnéticas: los rayos X.
Uno de los ejemplos más claros de ondas electromagnéticas son los rayos X.
En 1895 V.K. Roentgen (1845 - 1923) realizó una investigación sobre la corriente eléctrica en gases altamente enrarecidos. A los electrodos soldados en un tubo de vidrio desde el que se bombeaba previamente aire a una presión de ~ 10–3 mm Hg. Art., Se aplicó una diferencia de potencial de varios kilovoltios. Resultó que en este caso el tubo se convierte en una fuente de rayos, que Roentgen llamó "rayos X". Las propiedades básicas de los "rayos X" fueron estudiadas por el propio Roentgen como resultado de tres años de trabajo, por lo que en 1901 recibió el Premio Nobel, el primero entre los físicos. Los rayos descubiertos por él se llamaron más tarde con razón rayos X.
Figura 2.3. Diagramas de tubos de rayos X.
a) uno de los primeros tubos de rayos X, b) tubo de rayos X de finales del siglo XX.
K - cátodo térmico, A - ánodo de alto voltaje, T - calentamiento de cátodo caliente, E - haces de electrones acelerados (líneas discontinuas), P - flujos de rayos X (líneas discontinuas), O - ventanas en el cuerpo del tubo para la salida de rayos X.
Según la investigación científica moderna, los rayos X son radiación electromagnética invisible para el ojo con una longitud de onda que pertenece al rango con límites aproximados de 10–2–10 nanómetros.
Los rayos X se emiten durante la desaceleración de electrones rápidos en una sustancia (en este caso forman un espectro continuo) y durante las transiciones de electrones desde las capas externas de electrones de un átomo a la interna (y dan un espectro de líneas).
Las propiedades más importantes de los rayos X son las siguientes:
Los rayos atraviesan todos los materiales, incluidos los opacos a la luz visible. La intensidad de los rayos transmitidos I disminuye exponencialmente con el espesor x de la capa de sustancia
I (x) = I0 exp (–m / x), (2.16)
donde I0 es la intensidad de los rayos incidentes sobre la capa del material irradiado.
El coeficiente m caracteriza la atenuación del flujo de rayos X por la sustancia y depende de la densidad del material ry su composición química. Numerosos experimentos han demostrado que, en la primera aproximación, se observa la dependencia
Las corrientes de rayos X atraviesan tableros gruesos, láminas de metal, el cuerpo humano, etc. El importante poder de penetración de los rayos X ahora se usa ampliamente en la detección de fallas y en la medicina.
Los rayos X provocan la luminiscencia de ciertos compuestos químicos. Por ejemplo, una pantalla recubierta con sal de BaPt (CN) 4 se ilumina de color amarillo verdoso cuando se expone a los rayos X.
Los rayos X, que caen sobre las emulsiones fotográficas, las hacen ennegrecer.
Los rayos X ionizan el aire y otros gases, haciéndolos conductores de electricidad. Esta propiedad se utiliza en detectores que detectan rayos X invisibles y miden su intensidad.
Los rayos X tienen un fuerte efecto fisiológico. La irradiación a largo plazo de organismos vivos con intensos flujos de rayos X conduce a la aparición de enfermedades específicas (la llamada "enfermedad por radiación") e incluso a la muerte.
Como se mencionó anteriormente, los rayos X se emiten durante la desaceleración de los electrones rápidos en la materia y durante las transiciones de electrones desde las capas externas de electrones del átomo a la interna (y dan un espectro de líneas). Los detectores de rayos X se basan en las propiedades de los rayos X. Por lo tanto, se utilizan con mayor frecuencia como detectores: emulsiones fotográficas en películas y placas, pantallas luminiscentes, detectores llenos de gas y semiconductores.
Los efectos dominó típicos son los fenómenos de interferencia y difracción.
Originalmente, la difracción era la desviación de la propagación de la luz desde una dirección rectilínea. Este descubrimiento fue realizado en 1665 por el abad Francesco Grimaldi y sirvió de base para el desarrollo de la teoría ondulatoria de la luz. La difracción de la luz era la luz que se doblaba alrededor de los contornos de los objetos opacos y, como consecuencia, la penetración de la luz en el área de la sombra geométrica.
Después de la creación de la teoría de las ondas, quedó claro que la difracción de la luz es una consecuencia del fenómeno de interferencia de ondas emitidas por fuentes coherentes ubicadas en diferentes puntos del espacio.
Las ondas se denominan coherentes si su diferencia de fase permanece constante a lo largo del tiempo. Las fuentes de ondas coherentes son oscilaciones coherentes de fuentes de ondas. Las ondas sinusoidales, cuyas frecuencias no cambian con el tiempo, son siempre coherentes.
Las ondas coherentes emitidas por fuentes ubicadas en diferentes puntos se propagan en el espacio sin interacción y forman un campo de ondas total. Estrictamente hablando, las olas en sí mismas no "suman". Pero si un dispositivo de grabación está ubicado en cualquier punto del espacio, entonces su elemento sensible se pondrá en movimiento oscilatorio bajo la acción de las ondas. Cada onda actúa independientemente de las demás y el movimiento del elemento sensor es la suma de las vibraciones. En otras palabras, este proceso no cuadra
Arroz. 3.1. Sistema de dos fuentes y detector. L es la distancia desde la primera fuente al detector, L 'es la distancia desde la segunda fuente al detector, d es la distancia entre las fuentes.
Como ejemplo básico, considere la interferencia de ondas emitidas por fuentes coherentes de dos puntos (ver Figura 3.1). Las frecuencias y fases iniciales de oscilaciones de las fuentes coinciden. Las fuentes están ubicadas a una cierta distancia d unas de otras. Un detector que registra la intensidad del campo de ondas generado se encuentra a una distancia L de la primera fuente. El tipo de patrón de interferencia depende de los parámetros geométricos de las fuentes de ondas coherentes, de la dimensión del espacio en el que se propagan las ondas, etc.
Considere las funciones de onda que resultan de las oscilaciones emitidas por fuentes coherentes de dos puntos. Para hacer esto, vacíemos el eje z como se muestra en la Figura 3.1. Entonces las funciones de onda se verán así:
Introduzcamos el concepto de diferencia en las trayectorias de las olas. Para ello, considere las distancias desde las fuentes hasta el detector de registro L y L '. La distancia entre la primera fuente y el detector L difiere de la distancia entre la segunda fuente y el detector L 'en una cantidad t. Para encontrar t, considere un triángulo rectángulo que contiene las cantidades ty d. Entonces puedes encontrar t fácilmente usando la función seno:
Este valor se denominará diferencia en el curso de las olas. Y ahora multiplicamos este valor por el número de onda k y obtenemos un valor llamado diferencia de fase. Denotémoslo como ∆φ
Cuando dos ondas "alcanzan" el detector, las funciones (3.1) toman la forma:
Para simplificar la ley según la cual el detector oscilará, pongamos a cero el valor (–kL + j1) en la función x1 (t). Escribimos el valor L 'en la función x2 (t) según la función (3.4). Mediante simples transformaciones obtenemos que
Se puede observar que las relaciones (3.3) y (3.6) son iguales. Anteriormente, este valor se definía como la diferencia de fase. Basado en lo que se dijo anteriormente, Relación (3.6) se puede reescribir de la siguiente manera:
Ahora agregamos funciones (3.5).
(3.8)
Utilizando el método de amplitudes complejas, obtenemos la relación para la amplitud de la oscilación total:
donde φ0 se define por la relación (3.3).
Una vez que se ha encontrado la amplitud de la oscilación total, la intensidad de la oscilación total se puede encontrar como el cuadrado de la amplitud:
(3.10)
Considere el gráfico de la intensidad de la fluctuación total para diferentes parámetros. El ángulo θ cambia en el intervalo (esto se puede ver en la Figura 3.1), la longitud de onda cambia de 1 a 5.
La difracción de rayos X es un proceso que ocurre durante la dispersión elástica de la radiación de rayos X y consiste en la aparición de rayos desviados (difractados) que se propagan en ciertos ángulos al haz primario. La difracción de rayos X se debe a la coherencia espacial de las ondas secundarias que surgen cuando la radiación primaria es dispersada por los electrones que forman los átomos. En algunas direcciones, determinadas por la relación entre la longitud de onda de la radiación y las distancias interatómicas en la sustancia, se suman las ondas secundarias, estando en la misma fase, como resultado de lo cual se crea un haz difractivo intenso. En otras palabras, bajo la acción del campo electromagnético de la onda incidente, las partículas cargadas presentes en cada átomo se convierten en fuentes de ondas esféricas secundarias (dispersas). Las ondas secundarias separadas interfieren entre sí, formando haces de radiación tanto amplificados como atenuados que se propagan en diferentes direcciones.
Se puede suponer que la dispersión no va acompañada de dispersión y, por tanto, la frecuencia de las ondas dispersas coincide con la frecuencia de la onda primaria. Si la dispersión es elástica, el módulo del vector de onda tampoco cambia.
Consideremos el resultado de la interferencia de ondas secundarias en un punto alejado de todos los centros de dispersión a una distancia mucho mayor que las distancias interatómicas en la muestra investigada (irradiada). Deje que haya un detector en este punto y sume las oscilaciones causadas por las ondas dispersas que llegan a este punto. Dado que la distancia desde el dispersor hasta el detector excede significativamente la longitud de onda de la radiación dispersa, las secciones de las ondas secundarias que llegan al detector pueden considerarse planas con un grado suficiente de precisión, y sus vectores de onda, paralelos. Por tanto, la imagen física de la dispersión de rayos X, por analogía con la óptica, puede denominarse difracción de Fraunhofer.
Dependiendo del ángulo de dispersión q (el ángulo entre el vector de onda de la onda primaria y el vector que conecta el cristal y el detector), la amplitud de la oscilación total alcanzará un mínimo o un máximo. La intensidad de la radiación registrada por el detector es proporcional al cuadrado de la amplitud total. En consecuencia, la intensidad depende de la dirección de propagación de las ondas dispersas que llegan al detector, de la amplitud y longitud de onda de la radiación primaria, del número y las coordenadas de los centros de dispersión. Además, la amplitud de la onda secundaria formada por un átomo individual (y por lo tanto la intensidad total) está determinada por el factor atómico, una función decreciente del ángulo de dispersión q, que depende de la densidad electrónica de los átomos.
Consideremos la distribución de la intensidad de la radiación generada por n fuentes puntuales coherentes de ondas monocromáticas. En la figura 5.1 se muestra la geometría de un sistema que consta de n fuentes puntuales coherentes de ondas monocromáticas y un detector que puede moverse a lo largo de una línea recta.
Los números 1, 2, 3, 4, ..., n indican las posiciones de las fuentes puntuales.
El eje X se dirige a lo largo de la línea de movimiento del detector. Donde Z1, Z2, Z3, Z4, ..., Zn, son las distancias desde la primera, segunda, tercera, ..., enésima fuente al receptor, a lo largo del eje X se produce la suma de las intensidades de las oscilaciones, L- distancia del eje X a la línea que conecta las fuentes.
Para encontrar la intensidad de n fuentes, usamos la relación (3.10). Sumamos las amplitudes de forma vectorial. Entonces, para n fuentes, la función (3.10) toma la forma:
Esta es la ecuación para calcular la intensidad de radiación de n fuentes, donde
Aquí se puede calcular de la siguiente manera:
Sustituyendo (3.12), (3.13) y (3.14) en (3.11) obtenemos:
El factor atómico es una cantidad que caracteriza la capacidad de un átomo o ión aislado para dispersar coherentemente rayos X, electrones o neutrones (respectivamente, distinguir entre el factor atómico de rayos X, electrónico o de neutrones). El factor atómico determina la intensidad de la radiación dispersada por un átomo en una dirección particular.
Considere la interacción de una onda de rayos X con un átomo individual. El campo eléctrico de la onda genera fuerzas periódicas que actúan sobre todas las partículas cargadas que forman el átomo, sobre los electrones y sobre el núcleo. La aceleración que recibe una partícula es inversamente proporcional a la masa de la partícula. Cada partícula se convierte en una fuente de onda secundaria (es decir, dispersa). La intensidad de la radiación es proporcional al cuadrado de la aceleración; por lo tanto, la radiación dispersa es generada prácticamente solo por electrones; por lo tanto, el factor atómico de rayos X depende de la distribución de la densidad electrónica en el átomo.
Los electrones se encuentran dispersos dentro del átomo y el tamaño del átomo es comparable a la longitud de onda de los rayos X. Por lo tanto, las ondas secundarias creadas por electrones individuales del átomo tienen una diferencia de fase. Este cambio de fase Dφ depende de la dirección de propagación de la onda dispersa en relación con la dirección del vector de onda de la onda primaria. En consecuencia, la amplitud de la radiación dispersada por un átomo depende del ángulo de dispersión.
El factor atómico f (o la función de dispersión atómica) se define como la relación entre la amplitud de la onda dispersada por un átomo y la amplitud de la onda dispersada por un electrón libre. La magnitud del factor atómico depende del ángulo de dispersión qy de la longitud de onda de la radiación l. El valor g = sin (q) / l se utiliza como argumento para la función del factor atómico en estudios estructurales de rayos X.
Si el ángulo polar q = 0, entonces el valor del factor atómico es igual al número de electrones en el átomo (en otras palabras, el número atómico de un elemento químico en la tabla periódica). Al aumentar el ángulo de dispersión q, el factor atómico f (g) disminuye monótonamente a cero. En la figura 3.4 se muestra una vista típica de la función de dispersión atómica.
Dejemos que un flujo de rayos X con una cierta longitud de onda l se dirija a una muestra cristalina. En estudios físicos (al decodificar la estructura atómica por el método de difracción de rayos X, análisis elemental espectral de rayos X, etc.), el esquema geométrico del experimento generalmente se implementa con las siguientes características geométricas (ver Fig.1).
Figura 3.5. Patrón geométrico de irradiación de una pequeña muestra con un haz de rayos X estrecho.
1 - generador de rayos X (por ejemplo, tubo de rayos X), 2 - colimador, 3 - muestra en estudio. Las flechas discontinuas representan los flujos de rayos X.
El colimador genera un haz de rayos X estrecho. La muestra cristalina irradiada se ubica desde la salida del colimador a una distancia mucho mayor que el tamaño de la muestra. En los estudios estructurales de rayos X, las muestras se preparan con un tamaño menor que la sección transversal del haz. Se dice que la muestra se "baña" en el haz de rayos X incidente (vea la leyenda en la Figura 3.5).
Entonces se puede suponer con buena precisión que una onda electromagnética plana con una longitud l incide sobre la muestra en estudio. En otras palabras, todos los átomos de la muestra están expuestos a ondas planas coherentes con vectores de onda paralelos k0.
Los rayos X son ondas electromagnéticas que son transversales. Si el eje de coordenadas Z se dirige a lo largo del vector de onda k0, entonces los componentes de los campos eléctrico y magnético de una onda electromagnética plana se pueden escribir de la siguiente forma:
EX = EX0 cos (wt - k0 z + j0) EY = EY0 cos (wt - k0 z + j0)
BX = BX0 cos (wt - k0 z + j0) BY = BY0 cos (wt - k0 z + j0)
donde t es el tiempo, w es la frecuencia de la radiación electromagnética, k0 es el número de onda, j0 es la fase inicial. El número de onda es el módulo del vector de onda y es inversamente proporcional a la longitud de onda k0 = 2π / l. El valor numérico de la fase inicial depende de la elección del momento inicial de tiempo t0 = 0. Las cantidades EX0, EY0, BX0, BY0 son las amplitudes de los componentes correspondientes (3.16) de los campos eléctricos y magnéticos de la onda.
Por tanto, todos los componentes (3.16) de una onda electromagnética plana se describen mediante funciones armónicas elementales de la forma:
Y = A0 cos (peso - kz + j0) (3.17)
Consideremos la dispersión de una onda plana monocromática de rayos X por una multitud de átomos de la muestra en estudio (por una molécula, un cristal de dimensiones finitas, etc.). La interacción de una onda electromagnética con electrones de átomos conduce a la generación de ondas electromagnéticas secundarias (dispersas). Según la electrodinámica clásica, la dispersión de un electrón individual se produce en el ángulo sólido 4p y tiene una anisotropía significativa. Si la radiación de rayos X primaria no está polarizada, la densidad de flujo de la radiación dispersa de la onda se describe mediante la siguiente función
donde I0 es la densidad de flujo de radiación primaria, R es la distancia desde el punto de dispersión hasta el lugar del registro de radiación dispersa, q es el ángulo de dispersión polar, que se mide desde la dirección del vector de onda de la onda primaria plana k0 (ver Fig. 3.6). Parámetro
»2,818 × 10-6 nm (3,19)
históricamente llamado el radio clásico del electrón.
Figura 3.6. Ángulo polar de dispersión q de una onda primaria plana en una pequeña muestra de Cr en estudio.
Un cierto ángulo q define una superficie cónica en el espacio. El movimiento correlativo de los electrones dentro del átomo complica la anisotropía de la radiación dispersa. La amplitud de la onda de rayos X dispersada por un átomo se expresa en función de la longitud de onda y el ángulo polar f (q, l), que se denomina amplitud atómica.
Así, la distribución angular de la intensidad de la onda de rayos X dispersada por un átomo se expresa mediante la fórmula
y tiene simetría axial con respecto a la dirección del vector de onda de la onda primaria k0. El cuadrado de la amplitud atómica f 2 se denomina comúnmente factor atómico.
Como regla general, en instalaciones experimentales para estudios de rayos X estructurales y espectrales de rayos X, el detector de rayos X dispersos se ubica a una distancia R que excede significativamente el tamaño de la muestra de dispersión. En tales casos, la ventana de entrada del detector corta de la superficie de la fase constante de la onda dispersa un elemento que puede suponerse plano con alta precisión.
Figura 3.8. Diagrama geométrico de la dispersión de rayos X por átomos de la muestra 1 en condiciones de difracción de Fraunhofer.
2 - Detector de rayos X, k0 - vector de onda de la onda de rayos X primaria, las flechas discontinuas representan los flujos de rayos X primarios, los flujos de rayos X dispersos con puntos y guiones. Los círculos indican los átomos de la muestra en estudio.
Además, las distancias entre los átomos vecinos de la muestra irradiada son varios órdenes de magnitud menores que el diámetro de la ventana de entrada del detector.
En consecuencia, en esta geometría de detección, el detector percibe una corriente de ondas planas dispersas por átomos individuales, y se puede suponer que los vectores de onda de todas las ondas dispersas son paralelos con alta precisión.
Las características antes mencionadas de la dispersión de rayos X y su registro se han denominado históricamente difracción de Fraunhofer. Esta descripción aproximada del proceso de dispersión de rayos X por estructuras atómicas permite calcular el patrón de difracción (distribución angular de la intensidad de la radiación dispersa) con gran precisión. La prueba es que la aproximación de difracción de Fraunhofer es la base de los métodos de difracción de rayos X para estudiar una sustancia, que permiten determinar los parámetros de las celdas unitarias de los cristales, calcular las coordenadas de los átomos, establecer la presencia de varias fases en una muestra, determinar las características del defecto de los cristales, etc.
Considere una pequeña muestra de cristal que contiene un número finito de átomos de N con un número químico específico.
Introduzcamos un sistema de coordenadas rectangular. Su comienzo es compatible con el centro de uno de los átomos. La posición de cada centro del átomo (centro de dispersión) se especifica mediante tres coordenadas. xj, yj, zj, donde j es el número ordinal del átomo.
Deje que la muestra en estudio se exponga a una onda de rayos X primaria plana con un vector de onda k0 dirigido paralelo al eje Oz del sistema de coordenadas seleccionado. En este caso, la onda primaria está representada por una función de la forma (3.17).
La dispersión de rayos X por átomos puede ser inelástica o elástica. La dispersión elástica se produce sin cambiar la longitud de onda de los rayos X. Con la dispersión inelástica, la longitud de onda de la radiación aumenta y las ondas secundarias son incoherentes. En lo que sigue, solo se considera la dispersión elástica de rayos X por átomos.
Sea L la distancia desde el origen hasta el detector. Suponemos que se satisfacen las condiciones de difracción de Fraunhofer. Esto, en particular, significa que la distancia máxima entre los átomos de la muestra irradiada es varios órdenes de magnitud menor que la distancia L. En este caso, el elemento sensible del detector está expuesto a ondas planas con vectores de ondas paralelas k. Los módulos de todos los vectores son iguales al módulo del vector de onda k0 = 2π / l.
Cada onda plana produce una vibración armónica con una frecuencia
Si la onda primaria se aproxima satisfactoriamente mediante una onda armónica plana, entonces todas las ondas secundarias (dispersas por átomos) son coherentes. La diferencia de fase de las ondas dispersas depende de la diferencia en la trayectoria de estas ondas.
Dibujemos el eje auxiliar O desde el origen de coordenadas hasta el punto de ubicación de la ventana de entrada del detector. Entonces, cada secundario que se propaga en la dirección de este eje puede ser descrito por la función
y = A1 fcos (wt– kr + j0) (3.22)
donde la amplitud A1 depende de la amplitud de la onda primaria A0, y la fase inicial j0 es la misma para todas las ondas secundarias.
Una onda secundaria emitida por un átomo ubicado en el origen creará una oscilación del elemento sensible del detector, descrito por la función
A1 f (q) cos (peso - kL + j0) (3.23)
Otras ondas secundarias crearán oscilaciones con la misma frecuencia (3.21), pero difiriendo de la función (3.23) por el desplazamiento de fase, que a su vez depende de la diferencia en la trayectoria de las ondas secundarias.
Para un sistema de ondas monocromáticas coherentes planas que se mueven en una determinada dirección, el desplazamiento de fase relativo Dj es directamente proporcional a la diferencia de trayectoria DL
Dj = k × DL (3,24)
donde k es el número de onda
k = 2π / l. (3,25)
Para calcular la diferencia de trayectoria de las ondas secundarias (3.23), primero asumimos que la muestra irradiada es una cadena unidimensional de átomos ubicada a lo largo del eje de coordenadas Ox (véase la figura 3.9). Las coordenadas atómicas están dadas por los números xi, (j = 0, 1,…, N - 1), donde x0 = 0. La superficie de la fase constante de la onda plana primaria es paralela a la cadena atómica y la onda el vector k0 es perpendicular a él.
Calcularemos un patrón de difracción plano, es decir Distribución angular de la intensidad de la radiación dispersa en el plano que se muestra en la Fig. 3.9. En este caso, la orientación de la ubicación del detector (en otras palabras, la dirección del eje auxiliar Or) viene dada por el ángulo de dispersión, que se mide desde el eje Oz, es decir, en la dirección del vector de onda k0 de la onda primaria.
Figura 3.9. Esquema geométrico de difracción de Fraunhofer en un plano dado en una cadena rectilínea de átomos
Sin pérdida de generalidad, podemos suponer que todos los átomos están ubicados en el semieje derecho Ox. (a excepción del átomo ubicado en el centro de coordenadas).
Dado que se satisfacen las condiciones de difracción de Fraunhofer, los vectores de onda de todas las ondas dispersadas por los átomos llegan a la ventana de entrada del detector con vectores de onda paralelos k.
De la figura 3.9 se deduce que la onda emitida por el átomo con la coordenada xi recorre la distancia hasta el detector L - xisin (q). En consecuencia, la oscilación del elemento sensible del detector, provocada por la onda secundaria emitida por el átomo con la coordenada xi, es descrita por la función
A1 f (q) cos (wt - k (L– xj sin (q)) + j0) (3.26)
El resto de ondas dispersas que entran por la ventana del detector ubicado en una posición determinada tienen una forma similar.
El valor de la fase inicial j0 está determinado, en esencia, por el momento del comienzo del tiempo. Nada le impide elegir el valor de j0 igual a –kL. Entonces el movimiento del elemento sensible del detector estará representado por la suma
Esto significa que la diferencia de trayectoria entre las ondas dispersas por átomos con coordenadas xi y x0 es –xisin (q), y la diferencia de fase correspondiente es igual a kxisin (q).
La frecuencia w de oscilaciones de ondas electromagnéticas en el rango de rayos X es muy alta. Para rayos X con una longitud de onda l = Å, la frecuencia w es, en orden de magnitud, ~ 1019 seg-1. Los equipos modernos no pueden medir los valores instantáneos de la fuerza de los campos eléctricos y magnéticos (1) con cambios de campo tan rápidos, por lo tanto, todos los detectores de rayos X registran el valor promedio del cuadrado de la amplitud de las oscilaciones electromagnéticas.
La intensidad registrada de los rayos X dispersados por los átomos de la muestra irradiada es el cuadrado de la amplitud de la vibración total (11). Para calcular este valor, es recomendable utilizar el método de amplitudes complejas. Escribimos cada término en la suma (11) en forma compleja
A1 fexp (3,28)
donde i es la unidad imaginaria, Djj es el desplazamiento de fase, que es igual a kxjsin (q) en la imagen física considerada.
La expresión (12) se puede reescribir como
A1 feiwte - iDjj (3.29)
El factor dependiente del tiempo describe las oscilaciones del campo electromagnético con una frecuencia w. El módulo de este valor es igual a uno. Como consecuencia, la amplitud compleja de la oscilación electromagnética, expresada por la función (12), tiene la forma:
A1 fexp [–iDjj] (3,30)
La amplitud compleja de la oscilación total registrada por el detector es igual a la suma de cantidades (3.30), y la suma se lleva a cabo en todos los centros de dispersión, es decir, sobre todos los átomos de la muestra irradiada. El cuadrado de la parte real de la suma especificada determina la intensidad registrada de la radiación de rayos X dispersa
exacto al coeficiente instrumental (un factor determinado por las características del equipo de control).
La intensidad (3.31) es función del ángulo polar q y describe en el plano xoz la distribución angular de los rayos X dispersos por una cadena de átomos ubicados a lo largo del eje ox.
Ahora considere la dispersión de rayos X por un conjunto finito de átomos en el mismo plano. Deje que una onda plana de rayos X con un vector de onda k0 perpendicular al plano de los átomos caiga sobre este sistema de átomos.
Conectemos los ejes de coordenadas cartesianos al sistema físico dado. El eje oz está dirigido a lo largo del vector k0, y los ejes ox y oY están ubicados en el plano atómico. La posición de cada átomo se especifica mediante dos coordenadas xj e yj, donde j = 0,… N - 1. Sea el origen de las coordenadas alineado con el centro de uno de los átomos, que tiene el número j = 0.
Consideremos la dispersión de rayos X en el semiespacio z> 0. En este caso, se puede suponer que el detector se mueve sobre un hemisferio de cierto radio R, que es mucho más grande que el tamaño de la muestra irradiada. . La dirección al detector en condiciones de difracción de Fraunhofer coincide con los vectores de onda k de las ondas dispersas que llegan a la ventana de entrada del detector. Esta dirección se caracteriza por dos ángulos: polar q, que se traza desde el eje oz (como en las Figuras 3.9 y 3.10), y el acimut Ф, que se mide desde el eje ox en el plano xoY (ver Fig. 3.10). En otras palabras, q es el ángulo entre los vectores de onda de las ondas k0 primarias y k dispersas. Azimut Ф es el ángulo entre el eje OX y la proyección del vector k en el plano XOY.
Como en el caso anterior de una cadena unidimensional de átomos, la amplitud de la vibración total registrada por el detector está determinada por los cambios de fase relativos de ondas coherentes dispersas por átomos individuales. El cambio de fase de las ondas dispersas está relacionado con la diferencia de camino por la relación (3.24), como en el caso considerado anteriormente.
Encontremos la diferencia de trayectoria entre las ondas dispersas por átomos con coordenadas (x0 = 0, y0 = 0) y (x, y) en la dirección dada por el vector de onda k (es decir, por ciertos ángulos q y Ф). Dibujemos el eje auxiliar OU a lo largo de la proyección del vector k sobre el plano XOY (vea la figura 3.10).
Figura 3.10. Cálculo de la diferencia de trayectoria de ondas secundarias dispersas por un sistema plano de átomos en condiciones de difracción de Fraunhofer.
El punto F en el eje OU es la proyección del centro del j-ésimo átomo. La longitud del segmento OF es igual a xcos (Ф) + ysin (Ф), que se puede obtener transformando coordenadas o construcciones geométricas. La proyección del segmento OF en la dirección del vector de onda k da la diferencia de trayectoria deseada: la longitud del segmento OG, igual a
Dl = sen (q). (3,32)
En consecuencia, el desplazamiento de fase de las ondas secundarias dispersadas por átomos con coordenadas (x0 = 0, y0 = 0) y (xj, yj) en la dirección dada por ciertos ángulos q y Ф es igual a
Djj = k sen (q). (3,33)
La intensidad registrada de la radiación de rayos X dispersa se expresa mediante una fórmula similar a (3.31):
Finalmente, considere la difracción de rayos X de Fraunhofer por un objeto tridimensional. Usemos el sistema de coordenadas cartesianas usado en la tarea anterior. La diferencia entre la imagen física y la anterior radica solo en el hecho de que los centros de algunos átomos tienen coordenadas zj¹ 0.
La superficie de la fase constante de la onda monocromática del plano primario alcanza los centros de dispersión con diferentes coordenadas z¹ 0 en diferentes momentos. Como consecuencia, la fase inicial de la onda dispersada por el átomo con la coordenada z¹ 0 se retrasará con respecto a la fase de la onda dispersada por el átomo con la coordenada z = 0 por el valor wDt, donde Dt = z / v, v es la velocidad de propagación de la onda. La frecuencia y la longitud de onda están relacionadas por la relación
w = 2 pv / l (3,35)
por lo tanto, el cambio de fase de la onda dispersa es -2pz / lo -kz.
Por otro lado, si la coordenada del j-ésimo átomo es zj¹ 0, la diferencia de trayectoria relativa a la onda dispersa "cero" se incrementa adicionalmente en el valor zcos (q). Como resultado, el cambio de fase de la onda dispersada por un átomo con coordenadas arbitrarias (xj, yj, zj) en la dirección especificada por los ángulos q y Ф es igual a
Djj = k (sen (q) + zjcos (q) -zj). (3,36)
La intensidad de los rayos X dispersos registrados por el detector se expresa mediante la siguiente fórmula:
La simetría es la invariancia de un sistema físico o geométrico con respecto a varios tipos de transformaciones.
Los diferentes tipos de simetría están determinados por transformaciones bajo las cuales el sistema dado es invariante. Hay simetría traslacional, simetría rotacional, simetría de similitud, etc.
La simetría es una de las propiedades fundamentales del universo. Incluso las leyes básicas de la física: la conservación de la energía, el momento y el momento angular están asociadas con ciertas transformaciones simétricas del continuo espacio-tiempo.
La transformación específica bajo la cual el sistema dado es invariante se llama operación de simetría. El conjunto de puntos que permanecen estacionarios bajo una transformación simétrica forman un elemento de simetría. Por ejemplo, si la operación de simetría es rotación, entonces el elemento de simetría correspondiente será el eje alrededor del cual se realiza la rotación.
La simetría de los sistemas físicos finitos, cuyos elementos de simetría se cruzan al menos en un punto, se llama simetría puntual. La simetría puntual incluye invariancia con respecto a la rotación a través de un cierto ángulo (simetría rotacional), invariancia con respecto a la reflexión en un cierto plano (simetría especular), invariancia con respecto a la inversión en un punto dado (simetría de inversión).
La simetría de la gran mayoría de los objetos físicos no es absoluta. Esto significa que el sistema físico o geométrico no es completamente invariante bajo la transformación considerada.
Para describir cuantitativamente las desviaciones de la simetría exacta, se usa un funcional llamado grado de invariancia o coeficiente de pseudosimetría.
Sea alguna característica física del objeto en estudio descrita por una función puntual. Esta función puede ser densidad de masa, temperatura, potencial eléctrico, densidad de carga eléctrica, etc. Somos la simetría de este objeto con respecto a la transformación, que viene dada por alguna operación. Entonces, el grado de invariancia se determina mediante la siguiente fórmula (4.1), donde V es el volumen del objeto. Debajo de la integral en el numerador está el producto de una función por una función del mismo objeto en transformación. El numerador se denomina convolución de la función relativa a la operación. El denominador contiene una integral definida sobre el volumen del objeto desde el cuadrado de la función.
El denominador de la fórmula (4.1) sirve como normalización, por lo que el valor del funcional puede variar de 0 a 1. Si el sistema físico en consideración es completamente invariante con respecto a la operación, entonces el coeficiente de pseudosimetría es igual a la unidad. El valor = 0 corresponde al caso en el que no hay simetría del sistema con respecto a la operación.
El concepto de grado de invariancia se puede ampliar para describir la simetría de la distribución angular de la intensidad de los rayos X dispersos. En primer lugar, nos interesa la invariancia de los patrones de difracción con respecto a la rotación por un cierto ángulo azimutal alrededor del punto correspondiente al ángulo polar q = 0. En otras palabras, el propósito del estudio es la simetría rotacional de la distribución de la intensidad de los rayos X dispersos, y la rotación se realiza alrededor del vector de onda k0 de la radiación primaria.
Para estudiar las características de la simetría rotacional de los patrones de difracción, se puede adaptar un funcional general (1). La función en estudio en este caso es la distribución angular de la intensidad de los rayos X dispersos I (q, Ф), y la operación de simetría es la rotación del patrón de difracción por el ángulo azimutal a alrededor del punto central del patrón. con el ángulo polar q = 0. Así, la característica cuantitativa de la simetría rotacional del patrón de difracción es la siguiente funcionalidad:
Las integrales internas se toman sobre el rango del ángulo azimutal ΦÎ, y las integrales externas sobre el rango del ángulo polar qÎ.
Se debe prestar atención a algunas características importantes de todos los patrones de difracción. Figura 4.1. se ve que en el centro del diagrama polar está el máximo central de la intensidad de la radiación dispersa. Este máximo tiene una alta simetría, cercana a la simetría del grupo límite C ¥. En la distribución angular de la radiación dispersa, el máximo central ocupa un cierto intervalo de ángulos polares qÎ. La mitad de la anchura del máximo central depende sustancialmente de la longitud de onda de los rayos X l y del número de átomos en dispersión.
También es muy importante que la intensidad del máximo central supere significativamente la intensidad de todos los demás puntos de la distribución angular bidimensional de la radiación de rayos X dispersa. Por el contrario, con un aumento del ángulo polar, la intensidad de la radiación dispersa cae bruscamente en promedio. Esto significa que la región periférica del patrón de difracción (la región de ángulos polares que exceden un cierto valor de qM) prácticamente no afecta el valor del coeficiente de pseudosimetría rotacional (4.2).
Como consecuencia, el máximo central hace la principal contribución al grado de invariancia (4.2). En otras palabras, la alta simetría del máximo central suprime las características de simetría de todas las demás características del patrón de difracción.
Para un estudio detallado de la pseudo-simetría rotacional de la distribución angular de la radiación de rayos X dispersa, es aconsejable calcular los funcionales de la siguiente forma:
Las integrales externas sobre el ángulo polar tienen límites que puede establecer el investigador, lo que permite estudiar la pseudosimetría rotacional en diferentes intervalos del ángulo polar. En otras palabras, las cantidades del tipo (4.3) dan estimaciones cuantitativas de la pseudosimetría rotacional del patrón de difracción dentro del anillo, dada por un par de ángulos polares q1 y q2. (ver Figura 4.1).
Es natural dividir el rango de ángulos polares en subrangos de cierto ancho dq = q2 -q1 y calcular los coeficientes de pseudo-simetría para todos esos subrangos.
Figura 4.1. Un anillo en el diagrama polar del patrón de difracción que limita el rango de ángulos polares.
Se indicó anteriormente que en el modelado por computadora de la distribución angular de la intensidad de los rayos X dispersos, la función I (q, Ф) está representada por un conjunto bidimensional de valores numéricos I (ql, jm) para finitos conjuntos discretos de ángulos ql = lDq, l = 1,… nq; Фm = mDФ, m = 1, ... nФ. En consecuencia, al calcular los coeficientes de pseudosimetría ha a partir de los resultados del cálculo de la distribución angular de la intensidad de los rayos X dispersos, las integrales dobles en la expresión (4.2) se convierten en sumas dobles
Si estamos interesados en la pseudosimetría rotacional promediada de todo el patrón de difracción, entonces el grado de invariancia viene dado por la siguiente fórmula:
Si queremos investigar la pseudosimetría rotacional en diferentes subrangos del ángulo polar (ver Fig. 4.1), entonces es necesario calcular la razón de las sumas para los intervalos correspondientes del tipo (4.3). Entonces los coeficientes de pseudosimetría se representarán como:
donde los índices l1 y l2 corresponden a los valores de los ángulos polares q1 y q2
q1 = l1 Dq, q2 = l2 Dq. (4,6)
Estableciendo ciertos valores del ángulo de rotación a, es posible calcular los coeficientes de pseudo-simetría ha de los patrones de difracción para rotaciones de varios órdenes. Si estamos interesados en la pseudosimetría rotacional de enésimo orden, entonces el ángulo de rotación a se expresa mediante la relación.
an = 2p / n. (4,7)
En este trabajo, calculamos las características de la radiación de rayos X dispersada por un conjunto finito de átomos en las condiciones de difracción de Fraunhofer. La radiación de rayos X primaria estaba representada por una onda monocromática plana con un determinado vector de onda k0 y una longitud de onda l.
La distribución angular de la intensidad de los rayos X dispersos por un conjunto finito de átomos está representada por una función I (q, Ф), que depende de dos ángulos: q polar y azimutal F. Los ángulos q y Ф determinan la dirección de la rayos X dispersos al detector, que coincide con el vector de onda k de la onda de rayos X dispersos.
El ángulo polar q se mide desde la dirección del vector de onda k0 de la onda de rayos X primaria. El ángulo azimutal Φ se traza en el plano perpendicular al vector k0. Azimut Ф es el ángulo entre la proyección del vector de onda k de la onda dispersa en este plano y un eje azimutal elegido arbitrariamente.
El conjunto de valores de la función I (q, Ф) para todos los valores posibles de los argumentos q y Ф a menudo se denomina patrón de difracción.
En nuestro problema, consideramos la dispersión de rayos X en el hemisferio "frontal". Por tanto, el ángulo polar q pertenece al rango ,. El ángulo azimutal Ф toma valores en el intervalo)