En este artículo, verá cómo hacer un radiocontrol de bricolaje para 10 comandos. El alcance de este dispositivo es de 200 metros en el suelo y más de 400 metros en el aire.
El esquema fue tomado del sitio vrtp.ru
Transmisor

Receptor

Para trabajar, necesitamos una lista de piezas:
1) PIC16F628A-2 piezas (microcontrolador) (enlace a aliexpress pic16f628a
)
2) MRF49XA-2 piezas (transmisor de radio) (enlace a aliexpress MRF 49 XA
)
3) Inductor 47nH (o enrósquelo usted mismo) -6 piezas
Condensadores:
4) 33 uF (electrolítico) -2 piezas
5) 0,1 uF-6 piezas
6) 4.7 pF-4 piezas
7) 18 pF-2 piezas
Resistencias
8) 100 ohmios - 1 pieza
9) 560 Ohm-10 piezas
10) 1 Com-3 piezas
11) 1 x LED
12) botones - 10 piezas
13) Cuarzo 10MHz-2 piezas
14) Textolita
15) soldador
Como puede ver, el dispositivo consta de un mínimo de partes y todos pueden hacerlo. Uno solo tiene que querer. El dispositivo es muy estable, funciona inmediatamente después del montaje. El circuito se puede hacer como en una placa de circuito impreso. Así también mediante montaje en superficie (especialmente por primera vez, será más fácil programar de esta manera). Primero, realizamos un pago. Imprimimos

Soldamos todos los componentes, es mejor soldar el PIC16F628A con el último, ya que aún habrá que programarlo. El primer paso es soldar el MRF49XA









Después de leer este post, me prendí fuego y la idea de remachar mi avión. Tomé dibujos ya hechos, pedí motores, baterías y hélices a los chinos. Pero decidí hacer el radiocontrol por mi cuenta, en primer lugar, es más interesante, y en segundo lugar, tenemos que ocuparnos de algo mientras se va el paquete con el resto de repuestos, y en tercer lugar, se hizo posible ser original y agregue todo tipo de bollos.
¡Precaución, imágenes!


Pero después de todo, la mayoría de los microcontroladores tienen un temporizador de 16 bits (o más) para generar PWM. Aquí, el problema de la discreción desaparecerá de inmediato y la frecuencia se puede configurar exactamente. No pintaré durante mucho tiempo, inmediatamente doy una señal: 
No creo que haya una diferencia significativa entre 600 y 1200 valores para un servo chino, por lo que la cuestión de la precisión de posicionamiento puede considerarse cerrada.










Se utiliza un código de pulso numérico para transmitir comandos. El codificador del transmisor está construido sobre dos microcircuitos de la serie K561 (Fig. 1). El generador transmisor se ensambla de acuerdo con el esquema más simple con estabilización de frecuencia de cuarzo en el transistor VT2. El circuito oscilante L1C3 está sintonizado a la frecuencia del resonador de cristal, igual a 27,12 MHz.
El transmisor no prevé medidas especiales para hacer coincidir el circuito oscilatorio del transmisor con la antena, por lo tanto, la potencia radiada del transmisor es pequeña y el alcance del sistema de control de radio es de 5 ... 10 m. , puede aumentar el voltaje de suministro del transmisor a 9 V y usar un circuito CLC correspondiente y una bobina de extensión.
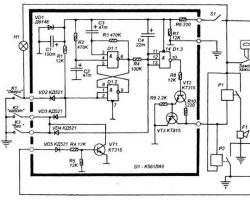
El diagrama del receptor del sistema de radiocontrol se muestra en la Fig.2. La etapa de entrada del receptor se ensambla de acuerdo con el esquema de un detector superregenerativo en un transistor VT1. El superregenerador tiene propiedades notables: alta sensibilidad, baja

Figura 2
la dependencia del nivel de señal de salida del nivel de entrada, simplicidad, pero también tiene desventajas: baja selectividad, emisión de señal, como resultado de lo cual funciona como un transmisor de baja potencia y puede interferir con otros receptores. El funcionamiento de un detector superregenerativo se describe en muchos libros sobre control de radio y no se trata aquí.
En la resistencia de carga R3 de la etapa de entrada, además de la señal útil, se distinguen los pulsos de amortiguación de diente de sierra con una frecuencia de 40 ... 60 kHz, para su filtrado, se utiliza el circuito R4 C9, para el mismo propósito el condensador C10 sirve. Los mismos elementos suprimen el ruido de impulso a corto plazo (por ejemplo, de los motores eléctricos del modelo) y parcialmente el ruido del detector superregenerativo.
La forma aproximada de la señal útil en el colector del transistor VT2, operando en el modo de amplificación lineal, se muestra en el primer diagrama de la Fig.3. Esta señal aún está lejos de las ráfagas de pulsos necesarias para el funcionamiento del decodificador. Para obtener una buena forma rectangular de los pulsos, se utiliza un amplificador-formador en el transistor VT3. En ausencia de una señal útil, cuando existe una señal de ruido de superregenerador de pequeña amplitud en el colector del transistor VT2, el transistor VT3 está en un estado de saturación superficial, el voltaje entre su colector y emisor es 250 ... 300 mV y lo hace no amplifica la señal de entrada. Tal punto de funcionamiento del transistor VT3 se establece mediante la resistencia de ajuste R6.

Fig. 3
Cuando aparecen paquetes de pulsos de radiofrecuencia, el detector superregenerativo alimenta paquetes de pulsos de polaridad positiva a la base del transistor VT2, las señales aparecen en el colector VT2 y la base VT3 de acuerdo con el primer diagrama de la Fig.3. La media onda negativa de la señal cierra el transistor VT3 y se forman pulsos de polaridad positiva en su colector, abriendo la etapa clave en el transistor VT4. En su colector, se forman paquetes de pulsos de polaridad negativa con una amplitud igual a la tensión de la fuente de alimentación, se alimentan a la entrada del decodificador de comandos.
El diagrama del decodificador de comandos se muestra en la Fig.4. Los paquetes de pulsos de entrada de polaridad negativa se alimentan a la parte del decodificador en los microcircuitos DD1 y DD2. Después de recibir la siguiente ráfaga de pulsos, el contador DD2 se establece en el estado correspondiente al número de pulsos en la ráfaga. Como ejemplo, la figura 3 ilustra el funcionamiento del contador en el caso de recibir paquetes de cinco pulsos. Cuando finaliza la ráfaga, aparece un registro en las salidas 1 y 4 del contador. 1, en la salida 2-log.0 (diagramas DD2: 3, DD2: 4, DD2: 5 en la Fig.3). Al frente del pulso del detector de pausa DD1.2, el estado del contador se reescribe en los registros de desplazamiento DD3.1, DD4, DD3.2, como resultado de lo cual los registros aparecen en sus salidas 1, respectivamente. 1, registro 0, registro 1.
Figura 4
Después del final de la segunda ráfaga de cinco pulsos, el pulso de la salida del detector de pausa DD1.2 desplaza la información previamente registrada de los bits 1 de los registros de desplazamiento a los bits 2, y en los bits 1 escribe el resultado de contar el número de pulsos del siguiente lote, etc. Como resultado, con la recepción continua de paquetes de cinco pulsos en todas las salidas de los registros de desplazamiento DD3.1 y DD3.2 serán log.1, en todas las salidas DD4 - log. 0. Estas señales se alimentan a las entradas de la mayoría de las válvulas del microcircuito DD5, las señales correspondientes a las de entrada aparecen en sus salidas, llegan a las entradas del decodificador DD6. El registro 1 aparece en la salida 5 del decodificador, lo que es un signo de recibir un comando con un número de pulsos igual a cinco.
Así es como se reciben las señales en ausencia de interferencias. Si el nivel de interferencia es fuerte, el número de pulsos en la ráfaga puede diferir del requerido. En este caso, las señales en las salidas de cada uno de los registros de desplazamiento diferirán de las correctas. Suponga que al recibir uno de los paquetes en lugar de cinco, el contador contará seis pulsos. Luego de recibir dos paquetes de cinco pulsos y uno de seis, los estados de las salidas de los registros DD3.1, DD4 y DD3.2 serán, respectivamente, los siguientes: 011,100, 111.
Las entradas del elemento DD5.1 recibirán dos log.1 y un log.0. Dado que la señal de salida de la válvula mayoritaria corresponde a la mayoría de las señales en sus entradas, se enviará a la entrada 1 del decodificador DD6 log.1. De manera similar, el elemento DD5.2 devolverá log.0, el elemento DD5.3 - log.1. La salida 5 del decodificador será log 1, como en el caso de recibir señales sin interferencias.
Por lo tanto, si en la secuencia de ráfagas de pulsos que llegan a la entrada del decodificador de comandos, en tres ráfagas consecutivas cualesquiera, dos tienen el número correcto de pulsos, se mantendrá constantemente un registro en la salida deseada del microcircuito DD6. 1.
Si no se presiona ninguno de los botones del transmisor, en las salidas 1, 2, 4 del contador después del final de la ráfaga de ocho pulsos log.0 y en todas las salidas utilizadas del decodificador DD6 también log.0. La Tabla 1 muestra la correspondencia de los comandos con el número de pulsos de ráfaga y las señales de salida del decodificador del sistema. Una ráfaga de cinco pulsos es un comando de "Parada", cuando se recibe, como se mencionó anteriormente, aparece log.1 en la salida 5 de DD6. Este log.1 va a las entradas R de los flip-flops DD7.1 y DD7.2 y las pone a 0. Aún no consideraremos el papel del microcircuito DD8 y asumiremos que la señal no cambia al pasar por su elementos. Como resultado de recibir el comando "Stop", las salidas PV, LV y H (back) serán log.0, los motores conectados a las salidas especificadas a través de amplificadores se detendrán.
Cuando se da el comando "Adelante", log.1 aparecerá en la salida 6 de DD6, establecerá el disparador DD7.2 en la entrada S en el estado 1, el disparador DD7.1, independientemente de su estado inicial, se activará. debe establecerse en el estado O en la entrada C, ya que en su entrada D log 0. Como resultado, el registro 1 aparecerá en las salidas de PV y LP, y el registro 0 en la salida H, ambos motores móviles girarán, lo que permitirá que el modelo avance. Cuando se da el comando "Atrás", el disparador DD7.1 estará en el estado 1, DD7.2 - en el estado 0, los motores proporcionarán el modelo para moverse hacia atrás.
Estos comandos se almacenan en los activadores del chip DD7 incluso después de soltar los botones SB5-SB7. Supongamos que mientras se mueve el modelo hacia adelante, se presiona el botón "Derecha" del SB2. En este caso, log.1 aparecerá en la salida 2 de DD6, irá a la salida 2 del elemento DD1.4 y cambiará log.1 en su salida a log.0. Como resultado, la señal PV será igual a cero y el motor derecho se detendrá. El modelo girará hacia la derecha debido a la oruga izquierda (segunda fila de la Tabla 1). Al retroceder, presionar el botón SB2 también hará que la señal en la salida del elemento DD1.4 cambie a lo contrario, pero ahora de log 0 a log 1, el motor derecho también se ralentizará y el modelo también girará a la Derecha. El modelo se comporta de manera similar cuando se presiona el botón "Izquierda" SB4.
Los comandos "Derecha" e "Izquierda" no están memorizados, actúan solo cuando se presiona el botón correspondiente. Asimismo, los comandos "Luces" y "Señal" (SB1 y SB3) no se memorizan. Cuando se presionan estos botones, los transistores VT2 y VT1 se encienden, respectivamente. Sus bases están conectadas a las salidas del decodificador DD6 sin resistencias limitadoras, lo cual está permitido cuando la tensión de alimentación de los microcircuitos de la serie K561 está entre 3 ... 6 V.
El microcircuito DD8 se utiliza para conectar el decodificador del sistema de control de radio con la placa móvil, que proporciona maniobra al evitar obstáculos. El uso del microcircuito Exclusive OR asegura el control del modelo incluso en aquellos momentos en los que realiza una maniobra automática. El diagrama de conexión completo de los conjuntos móviles se muestra en la Fig.5. Aquí A1 es un receptor de acuerdo con el esquema de la Fig. 2, A2 es una placa con microcircuitos DD1-DD4 en la Fig. 211, A3 es un decodificador de sistema de acuerdo con el esquema de la Fig. 4, A4 son amplificadores de motor. El diagrama de la Fig. 5 también muestra la conexión de la bombilla del faro HL1. El autor no utilizó el comando "Señal", la fuente de la señal de sonido se puede incluir en el circuito colector del transistor VT1 de manera similar a la inclusión de HL1 en el circuito colector VT2 ".

Figura 5
La fuente de alimentación de los motores eléctricos y las unidades A1-AZ está dividida para eliminar la influencia de la interferencia de los motores en la parte electrónica del móvil. Los cables comunes de ambos circuitos de potencia se combinan solo en el nodo A4, esto debe tenerse en cuenta durante la instalación. Para excluir la influencia de la interferencia de los motores en su circuito de suministro de energía, incluidos los estranguladores L1-L4 y los condensadores C1-C4, las carcasas metálicas de los motores están conectadas a un cable común.
En ausencia del nodo A2, se pueden aplicar voltajes a las entradas P, L, C del nodo A3 de acuerdo con las instrucciones en la Fig.5, también puede excluir el microcircuito DD8 en la Fig.4 conectando directamente el DD7.1 salida de disparo a la salida H6 y salida de disparo DD7 .2 con entradas DD 1.3 y DD 1.4.
Todas las unidades del sistema de radiocontrol se ensamblan en placas de circuito impreso: el transmisor - en un lado con dimensiones 60x40 mm (Figura 6), receptor - en un lado con dimensiones 105x40 mm (Figura 7), decodificador - en dos- lados con las mismas dimensiones (Figura 8). En estas figuras, las placas de una cara se muestran desde el lado opuesto al lado de la instalación de las piezas, la placa decodificadora se muestra desde ambos lados.
El sistema de radiocontrol utiliza resistencias MLT, condensadores cerámicos KTM (C1 en Fig.2), KM-5 y KM-6, condensadores electrolíticos K50-6 (C4, C8, C11, C12 en Fig.2), K50-16 ( C13 en la Figura 2). La resistencia ajustada R6 en la Fig. 2 es del tipo SPZ-16, sus terminales están doblados en ángulos rectos. El sistema utiliza bobinas estándar DM-0.2 30 μH (L2 en Fig.2) y DM-3 12 μH (L1-L4 en Fig.5); también se pueden utilizar bobinas caseras con parámetros similares. El resonador de cuarzo en el transmisor está en una caja de vidrio con un diámetro de 10 mm para una frecuencia de 27,12 o 28 ... 28,2 MHz. En ausencia de resonador de cuarzo, el transmisor se puede ensamblar de acuerdo con cualquiera de los esquemas publicados, manteniendo el circuito del modelador de ráfagas y modulador de acuerdo con la Fig.1. La bobina L1 del circuito oscilante del transmisor se enrolla en un marco con un diámetro de 5 mm y se ajusta mediante un núcleo de hierro carbonilo con un diámetro de 4 mm y una longitud de 6 mm. Contiene 12 vueltas de alambre PELSHO-0.38. La bobina L1 del receptor se enrolla en un marco con un diámetro de 8 mm con el mismo cable y contiene 9 vueltas, se ajusta con un núcleo de hierro carbonilo con un diámetro de 6 mm. El transmisor puede utilizar la misma bobina que el receptor.
La batería del transmisor es 3336, en el modelo, cuatro celdas A343 se utilizan para alimentar los motores, la parte electrónica es alimentada por cuatro celdas A316. La antena del receptor es un radio de bicicleta de 300 mm de largo, la antena del transmisor es telescópica, consta de cuatro curvas con una longitud total de 480 mm. El transmisor está ensamblado en una caja de plástico con dimensiones de 75x1500x30 mm; contiene un panel de control especial, que se describe a continuación.
El montaje del sistema de radiocontrol y su ajuste debe realizarse en la siguiente secuencia. En la placa del transmisor, es necesario ensamblar la parte digital, instalar todas las resistencias, excepto R5, y transistores, pero no instalar un resonador de cuarzo, bobina L1 y condensadores SZ-C5. Seleccionando las resistencias R1 y R2, configure la frecuencia de pulso en la salida DD1.2 a 180 ... 220 Hz con un ciclo de trabajo cercano a 2, luego verifique la exactitud de la generación de paquetes como se describe arriba.
Luego puede recolectar el decodificador de comando y, habiendo instalado la resistencia R5 en el transmisor, conecte el colector del transistor VT1 del transmisor a la entrada del decodificador. La tensión de alimentación de ambas placas se puede utilizar en 4,5 V comunes. La carga del transistor transmisor VT1 serán las resistencias conectadas en serie R4, R6 y la transición base-emisor del transistor VT2. El decodificador debe comprobarse como se describe anteriormente.
Se puede realizar una verificación adicional conectando primero las entradas L y R con el positivo de la fuente de alimentación, la entrada C con el cable común. En este caso, las señales en las salidas H, LV, PV cuando se presionan los botones del transmisor deben corresponder a las indicadas en la Tabla 1. Después de eso, puede conectar las unidades A3 y A4 y los motores del modelo de acuerdo con el diagrama de la Fig.222. Los estranguladores L1-L4 y los condensadores C1-C4 deben soldarse directamente a los terminales del motor.
A continuación, debe verificar la precisión del control del modelo mediante un par de cables que conectan las placas del transmisor y el decodificador. Si todo funciona correctamente, el transmisor y el receptor deben volver a ensamblarse. Después de ensamblar el receptor, primero debe ajustar la resistencia R6. Para hacer esto, es necesario "interrumpir" el modo superregenerativo del transistor VT1 cortocircuitando el circuito oscilatorio L1 C2, conectar un voltímetro entre el colector y el emisor VT3, poner el motor R6 en la posición de mínimo resistencia y, aumentando gradualmente su resistencia, establezca el voltaje de 250 ... 300 mV en el voltímetro, en este caso, es posible que deba elegir una resistencia R5. Ilumina un puente del circuito L1 C2.
Al encender el transmisor y el receptor y aumentar gradualmente la distancia entre ellos, debe ajustar sus contornos a la amplitud máxima de la señal observada con un osciloscopio o un voltímetro de voltaje alterno en el punto de control KT1. A continuación, debe ajustar la resistencia R6 para obtener la forma de pulso correcta en el punto de control KT2 de acuerdo con la Fig.220. Habiendo ensamblado todo el modelo de acuerdo con el esquema de la Fig.5 y asegurándose de que el sistema de control funciona normalmente a distancias de 2 ... 3 m, es necesario lograr el rango de operación máximo ajustando la resistencia R6.
En el transmisor y el receptor, puede utilizar casi cualquier transistores de silicio p-p-p de alta frecuencia (KT316, KT312, KT3102, KT315 con cualquier índice de letras). El microcircuito K561LP13 se puede reemplazar con el K561YK1; en su ausencia, en detrimento de la inmunidad al ruido, es posible excluir la comparación de comandos entrantes secuencialmente reemplazando el microcircuito decodificador de comando D03-DD5 con un microcircuito K561IR9.
En el transmisor, se utiliza un control remoto especial como botones SB2, SB4, SB6, SB7, que es conveniente para dar comandos con un significado direccional claro. El mando a distancia permite dar simultáneamente dos comandos no excluyentes entre sí, por ejemplo, "Adelante" y "Derecha", que, sin embargo, no se utiliza aquí.
Se utilizan cuatro microinterruptores como sistema de contacto del panel de control. La Fig. 9 muestra su diseño, las dimensiones se indican en relación a los microinterruptores PM2-1, existen muchos tipos de microinterruptores con las mismas dimensiones.

Los microinterruptores 3 están pegados a la base 2, fabricados en PCB de 2 ... 3 mm de espesor. Una placa 1 de latón o estaño con un espesor de 0,2 ... 0,3 mm se fija al fondo de la base 2 con cuatro tornillos 7 o remaches. En el centro, una palanca 5 hecha de vidrio orgánico se fija a esta placa con un tornillo M2 con una arandela.
Al girar la palanca 5, presiona las varillas de los microinterruptores 3 y los conmuta. Si se presiona la palanca en diagonal, se encenderán dos microinterruptores adyacentes.
Es recomendable montar el mando a distancia en el siguiente orden. Conecte las placas 1 y 2 entre sí, fije la palanca 5 a la placa 1 con un tornillo y una arandela 5. Pegue los microinterruptores 3 a la placa 2 con pegamento epoxi para que las varillas de los microinterruptores toquen la palanca 5.
Después de la polimerización del pegamento, pegue el bloque resultante a la cubierta del panel de control 4 o, para asegurar la mantenibilidad, fíjelo de alguna otra manera, mientras centra el bloque a lo largo del orificio cuadrado en la cubierta del panel de control.
Los botones KM1-1 se utilizan como SB1 y SB5.
Se puede utilizar un decodificador más simple del artículo "Decodificador de sistema de telecontrol simple"
Literatura: S.A. Biryukov. Dispositivos digitales basados en microcircuitos integrados en MOS. M. Radio y comunicación. 1996 año
| Designacion | Tipo de | Denominación | Cantidad | Nota | Tienda | Mi cuaderno | |
|---|---|---|---|---|---|---|---|
| Circuito transmisor. Foto 1. | |||||||
| DD1 | Chip | K561LE10 | 1 | En el bloc de notas | |||
| DD2 | Chip | K561IE8 | 1 | En el bloc de notas | |||
| VT1, VT2 | Transistor bipolar | KT315G | 2 | En el bloc de notas | |||
| VD1 | Diodo | KD503A | 1 | En el bloc de notas | |||
| C1 | Condensador | 6800 pF | 1 | En el bloc de notas | |||
| C2 | Condensador | 0,047 uF | 1 | En el bloc de notas | |||
| C3 | Condensador | 27 pF | 1 | En el bloc de notas | |||
| C4 | Condensador | 16 pF | 1 | En el bloc de notas | |||
| C5 | Condensador | 43 pF | 1 | En el bloc de notas | |||
| R1 | Resistor | 750 kΩ | 1 | En el bloc de notas | |||
| R2 | Resistor | 270 k ohmios | 1 | En el bloc de notas | |||
| R3 | Resistor | 110 k ohmios | 1 | En el bloc de notas | |||
| R4 | Resistor | 33 k ohmios | 1 | En el bloc de notas | |||
| R5 | Resistor | 7,5 k ohmios | 1 | En el bloc de notas | |||
| R6 | Resistor | 220 ohmios | 1 | En el bloc de notas | |||
| Z1 | Resonador de cuarzo | 27,12 MHz | 1 | En el bloc de notas | |||
| L1 | Inductor | 1 | En el bloc de notas | ||||
| Circuito receptor. Figura 2. | |||||||
| VT1-VT4 | Transistor bipolar | KT315G | 4 | En el bloc de notas | |||
| C1 | Condensador | 4,7 pF | 1 | En el bloc de notas | |||
| C2 | Condensador | 27 pF | 1 | En el bloc de notas | |||
| C3 | Condensador | 0,015 μF | 1 | En el bloc de notas | |||
| C4, C8, C11, C12 | 10 μF 10 V | 4 | En el bloc de notas | ||||
| C5 | Condensador | 18 pF | 1 | En el bloc de notas | |||
| C6 | Condensador | 2200 pF | 1 | En el bloc de notas | |||
| C7 | Condensador | 0,047 uF | 1 | En el bloc de notas | |||
| C9 | Condensador | 0,1 uF | 1 | En el bloc de notas | |||
| C10 | Condensador | 3300 pF | 1 | En el bloc de notas | |||
| C13 | Capacitor electrolítico | 500uF 6,3 V | 1 | En el bloc de notas | |||
| R1 | Resistor | 33 k ohmios | 1 | En el bloc de notas | |||
| R2 | Resistor | 20 kΩ | 1 | En el bloc de notas | |||
| R3 | Resistor | 3,3 k ohmios | 1 | En el bloc de notas | |||
| R4 | Resistor | 9,1 k ohmios | 1 | En el bloc de notas | |||
| R5 | Resistor | 510 k ohmios | 1 | En el bloc de notas | |||
| R6 | Resistencia recortadora | 1 MOhm | 1 | En el bloc de notas | |||
| R7 | Resistor | 12 kΩ | 1 | En el bloc de notas | |||
| R8 | Resistor | 2 kΩ | 1 | En el bloc de notas | |||
| R9 | Resistor | 1 kΩ | 1 | En el bloc de notas | |||
| R10 | Resistor | 22 kΩ | 1 | En el bloc de notas | |||
| R11 | Resistor | 7,5 k ohmios | 1 | En el bloc de notas | |||
| L1 | Inductor | 1 | Hecho por ti mismo | ||||
Anteriormente, no había tanta abundancia de productos en general y juguetes en particular. Y en muchos sentidos, el paraíso de los niños modernos se debe al progreso de la electrónica. Robots parlantes, multicópteros: todo esto no solo está en las tiendas, sino que se vende a un precio muy económico, para muchos. Además, los juguetes a veces son tan avanzados en términos de llenado electrónico e interesantes para el trabajo que está bien comprarlos no para los niños, sino para usted mismo. Sobre todo si el padre es un radioaficionado :) En general, al pasar por casualidad por el escaparate de la tienda "Todo por un dólar", se percató de una caja con un coche chino controlado por radio, ¡que costaba sólo $ 10! Naturalmente, esto es para todo el conjunto.

Todo en la caja está escrito en chino, ni siquiera una palabra rusa, ni siquiera una palabra en inglés. Bueno, es hora de aprender chino o desarrollar la intuición :) No hay nada complicado en teoría: pongo las baterías en el auto, tres baterías en el control remoto y vamos.

Tenga en cuenta que el conjunto no incluye pilas para el mando a distancia, solo para el coche. Entonces necesitas 3 pilas AA de 1,5 V.

El control remoto llamó la atención de inmediato por la ausencia total de botones, sin contar el botón de encendido.


El caso es que aquí los comandos para girar a la izquierda y a la derecha, avanzar y retroceder, se dan inclinando. Si abre el control remoto y examina la placa con detalles, verá 4 sensores de posición. Dentro de estos cilindros, soldados con inclinación, hay sensores en forma de bolas.


El microcircuito en sí es un transmisor DIP, como el resto de piezas, por lo que el mando a distancia es muy compacto y ligero. Se atornilla una antena telescópica en 3 rodillas en la parte delantera. Es largo cuando está desplegado, unos 30 cm. Si está parado al lado de un automóvil, no es necesario que lo despliegue. Pero con un alcance de más de 5 m, esto es necesario.
Antes de instalar las baterías en el compartimento de la batería del automóvil, debe cargarlas. Para ello, el kit incluye un pequeño cargador, naturalmente de impulso.

La placa en su interior es una copia de la carga habitual desde un teléfono móvil. Y los parámetros (y el circuito) son similares: un convertidor de pulsos en un transistor es de aproximadamente 2-3 vatios.

Cuando enciende el botón del automóvil (está en la parte inferior), las 4 ruedas comenzarán a parpadear inmediatamente los LED azules y rojos instalados desde el interior. Esto es hermoso y conveniente: queda claro de inmediato que la energía está activada. Para que no haya ninguna situación en la que hayan jugado y se hayan olvidado de apagar el coche, plantar o incluso deshacerse de las baterías.

Vamos a desmontarlo también y mirar debajo de la tapa. La parte receptora se ensambla sobre la base de un microcircuito. RX-2B... Puede utilizar los diagramas de cableado, son estándar para la mayoría de modelos radiocontrolados de 27 MHz, corto alcance.


Y los transistores C945 conmutan dos motores: el principal, que se encuentra en la parte trasera del automóvil, y el auxiliar, responsable de girar las ruedas delanteras.


Los faros delanteros se iluminan cuando el automóvil avanza. Al dar marcha atrás, se apagan inmediatamente. Es interesante que aquí no se utilizaron LED, sino bombillas. Por supuesto, esto es más realista, pero el consumo de energía aumenta en casi 100 mA, así que para ahorrar dinero, simplemente corto los cables que van a ellos desde el tablero de control con unas tijeras.

En general, los chinos una vez más sorprenden no tanto con las tecnologías, aunque mantienen el dedo en el pulso y reponen constantemente el mercado con nuevos dispositivos interesantes, pero con un precio escandalosamente bajo. Piense, ¿cuánto costarían 4 baterías por separado? ¿Y el cargador? Por no hablar del resto. En cuanto a la calidad: el niño lleva más de un mes jugando y nada, el coche está vivo y coleando, aunque ya se ha recargado 20 veces.
Estimado 4uvak. Recogí el otro día este milagro en 4 canales. Usé el módulo de radio FS1000A, Arados, por supuesto, todo está como está escrito, con la excepción del rango, pero creo que este módulo de radio simplemente no es una fuente, de la cual cuesta $ 1.5.
Pero lo recopilé para vincularlo al broadlink rm2 pro y luego no tuve éxito. Broadlink rm2 pro lo vio, leyó su comando y lo guardó en sí mismo, pero cuando envía un comando al decodificador, este último no reacciona de ninguna manera. Broadlink rm2 pro está diseñado de acuerdo con las características declaradas para funcionar en el rango de 315/433 MHz, pero no aceptó este milagro en sus filas. A esto le siguieron bailes con pandereta ..... En broadlink rm2 pro hay una función como temporizador para varios comandos y decidí configurar broadlink rm2 pro una tarea para enviar el mismo comando varias veces con un intervalo de 0 segundos , PERO !!! Habiendo escrito un comando para escribir más, se negó, argumentando que no había más espacio en la memoria para guardar comandos. Luego intenté hacer la misma operación con los comandos del televisor y él grabó 5 comandos sin problemas. De esto llegué a la conclusión de que el programa que escribió contiene comandos muy informativos y grandes enviados por el codificador al decodificador.
Soy cero absoluto en programación MK y su proyecto es el primer control remoto ensamblado y funcionando en mi vida. Nunca he sido amigo de la tecnología de radio y mi profesión está lejos de la electrónica.
Ahora la pregunta es:
Si, sin embargo, como creo, la señal enviada por el codificador es larga y grande, entonces puedes hacerla lo más escasa posible ???, con la misma base, para no cambiar el flejado MK y el circuito.
Entiendo que cualquier trabajo no remunerado se considera esclavitud :))))) y, por lo tanto, estoy dispuesto a pagar por tu trabajo. Por supuesto, no sé cuánto costará, pero creo que el precio será adecuado para el trabajo realizado. Quería transferirte dinero, pero donde estaba escrito, estaba en rublos y no estaba claro a dónde enviarlo. No soy residente de la Federación de Rusia y vivo en Kirguistán. Tengo una tarjeta maestra $. Si hay una opción para enviarle dinero a su tarjeta, entonces será buena. En rublos, ni siquiera sé cómo hacerlo. Probablemente haya otras opciones fáciles.
Pensé esto porque después de comprar un rm2 pro de broadlink conecté un televisor y un aire acondicionado gratis, pero el resto de aparatos de radio que tenemos no son baratos. Hay 19 interruptores de luz en la casa, 3-4-5 piezas por habitación y es muy caro comprar todo. Sí, y me gustaría rehacer los enchufes en el control, de lo contrario, qué tipo de casa inteligente resulta.
En general, mi tarea es hacer los mandos con mis propias manos, para que no se confundan y lo principal es que broadlink rm2 pro los entienda. Por el momento, no entiende el control remoto de acuerdo con su esquema.
En la discusión, no pude escribir, solo los usuarios registrados escriben allí.
Esperando su respuesta.